Get trending papers in your email inbox once a day!
Get trending papers in your email inbox!
Subscribe
TRANSIC: Sim-to-Real Policy Transfer by Learning from Online Correction
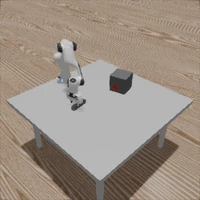
Learning in simulation and transferring the learned policy to the real world has the potential to enable generalist robots. The key challenge of this approach is to address simulation-to-reality (sim-to-real) gaps. Previous methods often require domain-specific knowledge a priori. We argue that a straightforward way to obtain such knowledge is by asking humans to observe and assist robot policy execution in the real world. The robots can then learn from humans to close various sim-to-real gaps. We propose TRANSIC, a data-driven approach to enable successful sim-to-real transfer based on a human-in-the-loop framework. TRANSIC allows humans to augment simulation policies to overcome various unmodeled sim-to-real gaps holistically through intervention and online correction. Residual policies can be learned from human corrections and integrated with simulation policies for autonomous execution. We show that our approach can achieve successful sim-to-real transfer in complex and contact-rich manipulation tasks such as furniture assembly. Through synergistic integration of policies learned in simulation and from humans, TRANSIC is effective as a holistic approach to addressing various, often coexisting sim-to-real gaps. It displays attractive properties such as scaling with human effort. Videos and code are available at https://transic-robot.github.io/



A Competition Winning Deep Reinforcement Learning Agent in microRTS
Scripted agents have predominantly won the five previous iterations of the IEEE microRTS (muRTS) competitions hosted at CIG and CoG. Despite Deep Reinforcement Learning (DRL) algorithms making significant strides in real-time strategy (RTS) games, their adoption in this primarily academic competition has been limited due to the considerable training resources required and the complexity inherent in creating and debugging such agents. RAISocketAI is the first DRL agent to win the IEEE microRTS competition. In a benchmark without performance constraints, RAISocketAI regularly defeated the two prior competition winners. This first competition-winning DRL submission can be a benchmark for future microRTS competitions and a starting point for future DRL research. Iteratively fine-tuning the base policy and transfer learning to specific maps were critical to RAISocketAI's winning performance. These strategies can be used to economically train future DRL agents. Further work in Imitation Learning using Behavior Cloning and fine-tuning these models with DRL has proven promising as an efficient way to bootstrap models with demonstrated, competitive behaviors.

Meta-RTL: Reinforcement-Based Meta-Transfer Learning for Low-Resource Commonsense Reasoning
Meta learning has been widely used to exploit rich-resource source tasks to improve the performance of low-resource target tasks. Unfortunately, most existing meta learning approaches treat different source tasks equally, ignoring the relatedness of source tasks to the target task in knowledge transfer. To mitigate this issue, we propose a reinforcement-based multi-source meta-transfer learning framework (Meta-RTL) for low-resource commonsense reasoning. In this framework, we present a reinforcement-based approach to dynamically estimating source task weights that measure the contribution of the corresponding tasks to the target task in the meta-transfer learning. The differences between the general loss of the meta model and task-specific losses of source-specific temporal meta models on sampled target data are fed into the policy network of the reinforcement learning module as rewards. The policy network is built upon LSTMs that capture long-term dependencies on source task weight estimation across meta learning iterations. We evaluate the proposed Meta-RTL using both BERT and ALBERT as the backbone of the meta model on three commonsense reasoning benchmark datasets. Experimental results demonstrate that Meta-RTL substantially outperforms strong baselines and previous task selection strategies and achieves larger improvements on extremely low-resource settings.

N2N Learning: Network to Network Compression via Policy Gradient Reinforcement Learning
While bigger and deeper neural network architectures continue to advance the state-of-the-art for many computer vision tasks, real-world adoption of these networks is impeded by hardware and speed constraints. Conventional model compression methods attempt to address this problem by modifying the architecture manually or using pre-defined heuristics. Since the space of all reduced architectures is very large, modifying the architecture of a deep neural network in this way is a difficult task. In this paper, we tackle this issue by introducing a principled method for learning reduced network architectures in a data-driven way using reinforcement learning. Our approach takes a larger `teacher' network as input and outputs a compressed `student' network derived from the `teacher' network. In the first stage of our method, a recurrent policy network aggressively removes layers from the large `teacher' model. In the second stage, another recurrent policy network carefully reduces the size of each remaining layer. The resulting network is then evaluated to obtain a reward -- a score based on the accuracy and compression of the network. Our approach uses this reward signal with policy gradients to train the policies to find a locally optimal student network. Our experiments show that we can achieve compression rates of more than 10x for models such as ResNet-34 while maintaining similar performance to the input `teacher' network. We also present a valuable transfer learning result which shows that policies which are pre-trained on smaller `teacher' networks can be used to rapidly speed up training on larger `teacher' networks.
Online Prototype Alignment for Few-shot Policy Transfer
Domain adaptation in reinforcement learning (RL) mainly deals with the changes of observation when transferring the policy to a new environment. Many traditional approaches of domain adaptation in RL manage to learn a mapping function between the source and target domain in explicit or implicit ways. However, they typically require access to abundant data from the target domain. Besides, they often rely on visual clues to learn the mapping function and may fail when the source domain looks quite different from the target domain. To address these problems, we propose a novel framework Online Prototype Alignment (OPA) to learn the mapping function based on the functional similarity of elements and is able to achieve the few-shot policy transfer within only several episodes. The key insight of OPA is to introduce an exploration mechanism that can interact with the unseen elements of the target domain in an efficient and purposeful manner, and then connect them with the seen elements in the source domain according to their functionalities (instead of visual clues). Experimental results show that when the target domain looks visually different from the source domain, OPA can achieve better transfer performance even with much fewer samples from the target domain, outperforming prior methods.
RoboTransfer: Geometry-Consistent Video Diffusion for Robotic Visual Policy Transfer
Imitation Learning has become a fundamental approach in robotic manipulation. However, collecting large-scale real-world robot demonstrations is prohibitively expensive. Simulators offer a cost-effective alternative, but the sim-to-real gap make it extremely challenging to scale. Therefore, we introduce RoboTransfer, a diffusion-based video generation framework for robotic data synthesis. Unlike previous methods, RoboTransfer integrates multi-view geometry with explicit control over scene components, such as background and object attributes. By incorporating cross-view feature interactions and global depth/normal conditions, RoboTransfer ensures geometry consistency across views. This framework allows fine-grained control, including background edits and object swaps. Experiments demonstrate that RoboTransfer is capable of generating multi-view videos with enhanced geometric consistency and visual fidelity. In addition, policies trained on the data generated by RoboTransfer achieve a 33.3% relative improvement in the success rate in the DIFF-OBJ setting and a substantial 251% relative improvement in the more challenging DIFF-ALL scenario. Explore more demos on our project page: https://horizonrobotics.github.io/robot_lab/robotransfer


Any-point Trajectory Modeling for Policy Learning
Learning from demonstration is a powerful method for teaching robots new skills, and having more demonstration data often improves policy learning. However, the high cost of collecting demonstration data is a significant bottleneck. Videos, as a rich data source, contain knowledge of behaviors, physics, and semantics, but extracting control-specific information from them is challenging due to the lack of action labels. In this work, we introduce a novel framework, Any-point Trajectory Modeling (ATM), that utilizes video demonstrations by pre-training a trajectory model to predict future trajectories of arbitrary points within a video frame. Once trained, these trajectories provide detailed control guidance, enabling the learning of robust visuomotor policies with minimal action-labeled data. Across over 130 language-conditioned tasks we evaluated in both simulation and the real world, ATM outperforms strong video pre-training baselines by 80% on average. Furthermore, we show effective transfer learning of manipulation skills from human videos and videos from a different robot morphology. Visualizations and code are available at: https://xingyu-lin.github.io/atm.
TactAlign: Human-to-Robot Policy Transfer via Tactile Alignment
Human demonstrations collected by wearable devices (e.g., tactile gloves) provide fast and dexterous supervision for policy learning, and are guided by rich, natural tactile feedback. However, a key challenge is how to transfer human-collected tactile signals to robots despite the differences in sensing modalities and embodiment. Existing human-to-robot (H2R) approaches that incorporate touch often assume identical tactile sensors, require paired data, and involve little to no embodiment gap between human demonstrator and the robots, limiting scalability and generality. We propose TactAlign, a cross-embodiment tactile alignment method that transfers human-collected tactile signals to a robot with different embodiment. TactAlign transforms human and robot tactile observations into a shared latent representation using a rectified flow, without paired datasets, manual labels, or privileged information. Our method enables low-cost latent transport guided by hand-object interaction-derived pseudo-pairs. We demonstrate that TactAlign improves H2R policy transfer across multiple contact-rich tasks (pivoting, insertion, lid closing), generalizes to unseen objects and tasks with human data (less than 5 minutes), and enables zero-shot H2R transfer on a highly dexterous tasks (light bulb screwing).
WPT: World-to-Policy Transfer via Online World Model Distillation
Recent years have witnessed remarkable progress in world models, which primarily aim to capture the spatio-temporal correlations between an agent's actions and the evolving environment. However, existing approaches often suffer from tight runtime coupling or depend on offline reward signals, resulting in substantial inference overhead or hindering end-to-end optimization. To overcome these limitations, we introduce WPT, a World-to-Policy Transfer training paradigm that enables online distillation under the guidance of an end-to-end world model. Specifically, we develop a trainable reward model that infuses world knowledge into a teacher policy by aligning candidate trajectories with the future dynamics predicted by the world model. Subsequently, we propose policy distillation and world reward distillation to transfer the teacher's reasoning ability into a lightweight student policy, enhancing planning performance while preserving real-time deployability. Extensive experiments on both open-loop and closed-loop benchmarks show that our WPT achieves state-of-the-art performance with a simple policy architecture: it attains a 0.11 collision rate (open-loop) and achieves a 79.23 driving score (closed-loop) surpassing both world-model-based and imitation-learning methods in accuracy and safety. Moreover, the student sustains up to 4.9x faster inference, while retaining most of the gains.
Enabling Multi-Agent Transfer Reinforcement Learning via Scenario Independent Representation
Multi-Agent Reinforcement Learning (MARL) algorithms are widely adopted in tackling complex tasks that require collaboration and competition among agents in dynamic Multi-Agent Systems (MAS). However, learning such tasks from scratch is arduous and may not always be feasible, particularly for MASs with a large number of interactive agents due to the extensive sample complexity. Therefore, reusing knowledge gained from past experiences or other agents could efficiently accelerate the learning process and upscale MARL algorithms. In this study, we introduce a novel framework that enables transfer learning for MARL through unifying various state spaces into fixed-size inputs that allow one unified deep-learning policy viable in different scenarios within a MAS. We evaluated our approach in a range of scenarios within the StarCraft Multi-Agent Challenge (SMAC) environment, and the findings show significant enhancements in multi-agent learning performance using maneuvering skills learned from other scenarios compared to agents learning from scratch. Furthermore, we adopted Curriculum Transfer Learning (CTL), enabling our deep learning policy to progressively acquire knowledge and skills across pre-designed homogeneous learning scenarios organized by difficulty levels. This process promotes inter- and intra-agent knowledge transfer, leading to high multi-agent learning performance in more complicated heterogeneous scenarios.
Grounding Bodily Awareness in Visual Representations for Efficient Policy Learning
Learning effective visual representations for robotic manipulation remains a fundamental challenge due to the complex body dynamics involved in action execution. In this paper, we study how visual representations that carry body-relevant cues can enable efficient policy learning for downstream robotic manipulation tasks. We present Inter-token Contrast (ICon), a contrastive learning method applied to the token-level representations of Vision Transformers (ViTs). ICon enforces a separation in the feature space between agent-specific and environment-specific tokens, resulting in agent-centric visual representations that embed body-specific inductive biases. This framework can be seamlessly integrated into end-to-end policy learning by incorporating the contrastive loss as an auxiliary objective. Our experiments show that ICon not only improves policy performance across various manipulation tasks but also facilitates policy transfer across different robots. The project website: https://github.com/HenryWJL/icon
Reinforcement Learning by Guided Safe Exploration
Safety is critical to broadening the application of reinforcement learning (RL). Often, we train RL agents in a controlled environment, such as a laboratory, before deploying them in the real world. However, the real-world target task might be unknown prior to deployment. Reward-free RL trains an agent without the reward to adapt quickly once the reward is revealed. We consider the constrained reward-free setting, where an agent (the guide) learns to explore safely without the reward signal. This agent is trained in a controlled environment, which allows unsafe interactions and still provides the safety signal. After the target task is revealed, safety violations are not allowed anymore. Thus, the guide is leveraged to compose a safe behaviour policy. Drawing from transfer learning, we also regularize a target policy (the student) towards the guide while the student is unreliable and gradually eliminate the influence of the guide as training progresses. The empirical analysis shows that this method can achieve safe transfer learning and helps the student solve the target task faster.
Emergent Complexity and Zero-shot Transfer via Unsupervised Environment Design
A wide range of reinforcement learning (RL) problems - including robustness, transfer learning, unsupervised RL, and emergent complexity - require specifying a distribution of tasks or environments in which a policy will be trained. However, creating a useful distribution of environments is error prone, and takes a significant amount of developer time and effort. We propose Unsupervised Environment Design (UED) as an alternative paradigm, where developers provide environments with unknown parameters, and these parameters are used to automatically produce a distribution over valid, solvable environments. Existing approaches to automatically generating environments suffer from common failure modes: domain randomization cannot generate structure or adapt the difficulty of the environment to the agent's learning progress, and minimax adversarial training leads to worst-case environments that are often unsolvable. To generate structured, solvable environments for our protagonist agent, we introduce a second, antagonist agent that is allied with the environment-generating adversary. The adversary is motivated to generate environments which maximize regret, defined as the difference between the protagonist and antagonist agent's return. We call our technique Protagonist Antagonist Induced Regret Environment Design (PAIRED). Our experiments demonstrate that PAIRED produces a natural curriculum of increasingly complex environments, and PAIRED agents achieve higher zero-shot transfer performance when tested in highly novel environments.
Learning Generalizable Skills from Offline Multi-Task Data for Multi-Agent Cooperation
Learning cooperative multi-agent policy from offline multi-task data that can generalize to unseen tasks with varying numbers of agents and targets is an attractive problem in many scenarios. Although aggregating general behavior patterns among multiple tasks as skills to improve policy transfer is a promising approach, two primary challenges hinder the further advancement of skill learning in offline multi-task MARL. Firstly, extracting general cooperative behaviors from various action sequences as common skills lacks bringing cooperative temporal knowledge into them. Secondly, existing works only involve common skills and can not adaptively choose independent knowledge as task-specific skills in each task for fine-grained action execution. To tackle these challenges, we propose Hierarchical and Separate Skill Discovery (HiSSD), a novel approach for generalizable offline multi-task MARL through skill learning. HiSSD leverages a hierarchical framework that jointly learns common and task-specific skills. The common skills learn cooperative temporal knowledge and enable in-sample exploitation for offline multi-task MARL. The task-specific skills represent the priors of each task and achieve a task-guided fine-grained action execution. To verify the advancement of our method, we conduct experiments on multi-agent MuJoCo and SMAC benchmarks. After training the policy using HiSSD on offline multi-task data, the empirical results show that HiSSD assigns effective cooperative behaviors and obtains superior performance in unseen tasks.
End-to-end Whispered Speech Recognition with Frequency-weighted Approaches and Pseudo Whisper Pre-training
Whispering is an important mode of human speech, but no end-to-end recognition results for it were reported yet, probably due to the scarcity of available whispered speech data. In this paper, we present several approaches for end-to-end (E2E) recognition of whispered speech considering the special characteristics of whispered speech and the scarcity of data. This includes a frequency-weighted SpecAugment policy and a frequency-divided CNN feature extractor for better capturing the high-frequency structures of whispered speech, and a layer-wise transfer learning approach to pre-train a model with normal or normal-to-whispered converted speech then fine-tune it with whispered speech to bridge the gap between whispered and normal speech. We achieve an overall relative reduction of 19.8% in PER and 44.4% in CER on a relatively small whispered TIMIT corpus. The results indicate as long as we have a good E2E model pre-trained on normal or pseudo-whispered speech, a relatively small set of whispered speech may suffice to obtain a reasonably good E2E whispered speech recognizer.
Uncertainty-quantified Rollout Policy Adaptation for Unlabelled Cross-domain Temporal Grounding
Video Temporal Grounding (TG) aims to temporally locate video segments matching a natural language description (a query) in a long video. While Vision-Language Models (VLMs) are effective at holistic semantic matching, they often struggle with fine-grained temporal localisation. Recently, Group Relative Policy Optimisation (GRPO) reformulates the inference process as a reinforcement learning task, enabling fine-grained grounding and achieving strong in-domain performance. However, GRPO relies on labelled data, making it unsuitable in unlabelled domains. Moreover, because videos are large and expensive to store and process, performing full-scale adaptation introduces prohibitive latency and computational overhead, making it impractical for real-time deployment. To overcome both problems, we introduce a Data-Efficient Unlabelled Cross-domain Temporal Grounding method, from which a model is first trained on a labelled source domain, then adapted to a target domain using only a small number of unlabelled videos from the target domain. This approach eliminates the need for target annotation and keeps both computational and storage overhead low enough to run in real time. Specifically, we introduce. Uncertainty-quantified Rollout Policy Adaptation (URPA) for cross-domain knowledge transfer in learning video temporal grounding without target labels. URPA generates multiple candidate predictions using GRPO rollouts, averages them to form a pseudo label, and estimates confidence from the variance across these rollouts. This confidence then weights the training rewards, guiding the model to focus on reliable supervision. Experiments on three datasets across six cross-domain settings show that URPA generalises well using only a few unlabelled target videos. Codes will be released once published.
Language-Driven Representation Learning for Robotics
Recent work in visual representation learning for robotics demonstrates the viability of learning from large video datasets of humans performing everyday tasks. Leveraging methods such as masked autoencoding and contrastive learning, these representations exhibit strong transfer to policy learning for visuomotor control. But, robot learning encompasses a diverse set of problems beyond control including grasp affordance prediction, language-conditioned imitation learning, and intent scoring for human-robot collaboration, amongst others. First, we demonstrate that existing representations yield inconsistent results across these tasks: masked autoencoding approaches pick up on low-level spatial features at the cost of high-level semantics, while contrastive learning approaches capture the opposite. We then introduce Voltron, a framework for language-driven representation learning from human videos and associated captions. Voltron trades off language-conditioned visual reconstruction to learn low-level visual patterns, and visually-grounded language generation to encode high-level semantics. We also construct a new evaluation suite spanning five distinct robot learning problems x2013 a unified platform for holistically evaluating visual representations for robotics. Through comprehensive, controlled experiments across all five problems, we find that Voltron's language-driven representations outperform the prior state-of-the-art, especially on targeted problems requiring higher-level features.

ManipTrans: Efficient Dexterous Bimanual Manipulation Transfer via Residual Learning
Human hands play a central role in interacting, motivating increasing research in dexterous robotic manipulation. Data-driven embodied AI algorithms demand precise, large-scale, human-like manipulation sequences, which are challenging to obtain with conventional reinforcement learning or real-world teleoperation. To address this, we introduce ManipTrans, a novel two-stage method for efficiently transferring human bimanual skills to dexterous robotic hands in simulation. ManipTrans first pre-trains a generalist trajectory imitator to mimic hand motion, then fine-tunes a specific residual module under interaction constraints, enabling efficient learning and accurate execution of complex bimanual tasks. Experiments show that ManipTrans surpasses state-of-the-art methods in success rate, fidelity, and efficiency. Leveraging ManipTrans, we transfer multiple hand-object datasets to robotic hands, creating DexManipNet, a large-scale dataset featuring previously unexplored tasks like pen capping and bottle unscrewing. DexManipNet comprises 3.3K episodes of robotic manipulation and is easily extensible, facilitating further policy training for dexterous hands and enabling real-world deployments.



Hypernetworks for Zero-shot Transfer in Reinforcement Learning
In this paper, hypernetworks are trained to generate behaviors across a range of unseen task conditions, via a novel TD-based training objective and data from a set of near-optimal RL solutions for training tasks. This work relates to meta RL, contextual RL, and transfer learning, with a particular focus on zero-shot performance at test time, enabled by knowledge of the task parameters (also known as context). Our technical approach is based upon viewing each RL algorithm as a mapping from the MDP specifics to the near-optimal value function and policy and seek to approximate it with a hypernetwork that can generate near-optimal value functions and policies, given the parameters of the MDP. We show that, under certain conditions, this mapping can be considered as a supervised learning problem. We empirically evaluate the effectiveness of our method for zero-shot transfer to new reward and transition dynamics on a series of continuous control tasks from DeepMind Control Suite. Our method demonstrates significant improvements over baselines from multitask and meta RL approaches.
Vid2Act: Activate Offline Videos for Visual RL
Pretraining RL models on offline video datasets is a promising way to improve their training efficiency in online tasks, but challenging due to the inherent mismatch in tasks, dynamics, and behaviors across domains. A recent model, APV, sidesteps the accompanied action records in offline datasets and instead focuses on pretraining a task-irrelevant, action-free world model within the source domains. We present Vid2Act, a model-based RL method that learns to transfer valuable action-conditioned dynamics and potentially useful action demonstrations from offline to online settings. The main idea is to use the world models not only as simulators for behavior learning but also as tools to measure the domain relevance for both dynamics representation transfer and policy transfer. Specifically, we train the world models to generate a set of time-varying task similarities using a domain-selective knowledge distillation loss. These similarities serve two purposes: (i) adaptively transferring the most useful source knowledge to facilitate dynamics learning, and (ii) learning to replay the most relevant source actions to guide the target policy. We demonstrate the advantages of Vid2Act over the action-free visual RL pretraining method in both Meta-World and DeepMind Control Suite.
Domain Randomization via Entropy Maximization
Varying dynamics parameters in simulation is a popular Domain Randomization (DR) approach for overcoming the reality gap in Reinforcement Learning (RL). Nevertheless, DR heavily hinges on the choice of the sampling distribution of the dynamics parameters, since high variability is crucial to regularize the agent's behavior but notoriously leads to overly conservative policies when randomizing excessively. In this paper, we propose a novel approach to address sim-to-real transfer, which automatically shapes dynamics distributions during training in simulation without requiring real-world data. We introduce DOmain RAndomization via Entropy MaximizatiON (DORAEMON), a constrained optimization problem that directly maximizes the entropy of the training distribution while retaining generalization capabilities. In achieving this, DORAEMON gradually increases the diversity of sampled dynamics parameters as long as the probability of success of the current policy is sufficiently high. We empirically validate the consistent benefits of DORAEMON in obtaining highly adaptive and generalizable policies, i.e. solving the task at hand across the widest range of dynamics parameters, as opposed to representative baselines from the DR literature. Notably, we also demonstrate the Sim2Real applicability of DORAEMON through its successful zero-shot transfer in a robotic manipulation setup under unknown real-world parameters.

VOLD: Reasoning Transfer from LLMs to Vision-Language Models via On-Policy Distillation
Training vision-language models (VLMs) for complex reasoning remains a challenging task, i.a. due to the scarcity of high-quality image-text reasoning data. Conversely, text-based reasoning resources are abundant and scalable, but it is still an open question how to leveraging them for VLM reasoning. To address this problem, we propose VOLD, a framework to transfer reasoning capabilities from text-only teacher models to VLM student models. To this end, VOLD combines reinforcement learning via Group Relative Policy Optimization (GRPO) with on-policy distillation, which allows the student reasoning traces to be guided by the teacher model, resulting in a significant gain over using GRPO alone. We further show that a cold-start alignment is essential for an effective transfer during the online training phase in this scenario and that without sufficient distributional alignment between teacher and student, on-policy distillation fails to provide meaningful guidance. We evaluate VOLD across diverse benchmarks including MMMU-Pro, MathVision, MathVista, and LogicVista, showing that VOLD outperforms the baseline model significantly and improves over the state of the art by a margin. Our ablation shows the importance of a cold-start alignment via SFT for on-policy distillation with a text-only teacher.
POPE: Learning to Reason on Hard Problems via Privileged On-Policy Exploration
Reinforcement learning (RL) has improved the reasoning abilities of large language models (LLMs), yet state-of-the-art methods still fail to learn on many training problems. On hard problems, on-policy RL rarely explores even a single correct rollout, yielding zero reward and no learning signal for driving improvement. We find that natural solutions to remedy this exploration problem from classical RL, such as entropy bonuses, more permissive clipping of the importance ratio, or direct optimization of pass@k objectives, do not resolve this issue and often destabilize optimization without improving solvability. A natural alternative is to leverage transfer from easier problems. However, we show that mixing easy and hard problems during RL training is counterproductive due to ray interference, where optimization focuses on already-solvable problems in a way that actively inhibits progress on harder ones. To address this challenge, we introduce Privileged On-Policy Exploration (POPE), an approach that leverages human- or other oracle solutions as privileged information to guide exploration on hard problems, unlike methods that use oracle solutions as training targets (e.g., off-policy RL methods or warmstarting from SFT). POPE augments hard problems with prefixes of oracle solutions, enabling RL to obtain non-zero rewards during guided rollouts. Crucially, the resulting behaviors transfer back to the original, unguided problems through a synergy between instruction-following and reasoning. Empirically, POPE expands the set of solvable problems and substantially improves performance on challenging reasoning benchmarks.
Motion Tracks: A Unified Representation for Human-Robot Transfer in Few-Shot Imitation Learning
Teaching robots to autonomously complete everyday tasks remains a challenge. Imitation Learning (IL) is a powerful approach that imbues robots with skills via demonstrations, but is limited by the labor-intensive process of collecting teleoperated robot data. Human videos offer a scalable alternative, but it remains difficult to directly train IL policies from them due to the lack of robot action labels. To address this, we propose to represent actions as short-horizon 2D trajectories on an image. These actions, or motion tracks, capture the predicted direction of motion for either human hands or robot end-effectors. We instantiate an IL policy called Motion Track Policy (MT-pi) which receives image observations and outputs motion tracks as actions. By leveraging this unified, cross-embodiment action space, MT-pi completes tasks with high success given just minutes of human video and limited additional robot demonstrations. At test time, we predict motion tracks from two camera views, recovering 6DoF trajectories via multi-view synthesis. MT-pi achieves an average success rate of 86.5% across 4 real-world tasks, outperforming state-of-the-art IL baselines which do not leverage human data or our action space by 40%, and generalizes to scenarios seen only in human videos. Code and videos are available on our website https://portal-cornell.github.io/motion_track_policy/.
Automated Creation of Digital Cousins for Robust Policy Learning
Training robot policies in the real world can be unsafe, costly, and difficult to scale. Simulation serves as an inexpensive and potentially limitless source of training data, but suffers from the semantics and physics disparity between simulated and real-world environments. These discrepancies can be minimized by training in digital twins, which serve as virtual replicas of a real scene but are expensive to generate and cannot produce cross-domain generalization. To address these limitations, we propose the concept of digital cousins, a virtual asset or scene that, unlike a digital twin, does not explicitly model a real-world counterpart but still exhibits similar geometric and semantic affordances. As a result, digital cousins simultaneously reduce the cost of generating an analogous virtual environment while also facilitating better robustness during sim-to-real domain transfer by providing a distribution of similar training scenes. Leveraging digital cousins, we introduce a novel method for their automated creation, and propose a fully automated real-to-sim-to-real pipeline for generating fully interactive scenes and training robot policies that can be deployed zero-shot in the original scene. We find that digital cousin scenes that preserve geometric and semantic affordances can be produced automatically, and can be used to train policies that outperform policies trained on digital twins, achieving 90% vs. 25% success rates under zero-shot sim-to-real transfer. Additional details are available at https://digital-cousins.github.io/.
NavDP: Learning Sim-to-Real Navigation Diffusion Policy with Privileged Information Guidance
Learning navigation in dynamic open-world environments is an important yet challenging skill for robots. Most previous methods rely on precise localization and mapping or learn from expensive real-world demonstrations. In this paper, we propose the Navigation Diffusion Policy (NavDP), an end-to-end framework trained solely in simulation and can zero-shot transfer to different embodiments in diverse real-world environments. The key ingredient of NavDP's network is the combination of diffusion-based trajectory generation and a critic function for trajectory selection, which are conditioned on only local observation tokens encoded from a shared policy transformer. Given the privileged information of the global environment in simulation, we scale up the demonstrations of good quality to train the diffusion policy and formulate the critic value function targets with contrastive negative samples. Our demonstration generation approach achieves about 2,500 trajectories/GPU per day, 20times more efficient than real-world data collection, and results in a large-scale navigation dataset with 363.2km trajectories across 1244 scenes. Trained with this simulation dataset, NavDP achieves state-of-the-art performance and consistently outstanding generalization capability on quadruped, wheeled, and humanoid robots in diverse indoor and outdoor environments. In addition, we present a preliminary attempt at using Gaussian Splatting to make in-domain real-to-sim fine-tuning to further bridge the sim-to-real gap. Experiments show that adding such real-to-sim data can improve the success rate by 30\% without hurting its generalization capability.




Investigating the role of model-based learning in exploration and transfer
State of the art reinforcement learning has enabled training agents on tasks of ever increasing complexity. However, the current paradigm tends to favor training agents from scratch on every new task or on collections of tasks with a view towards generalizing to novel task configurations. The former suffers from poor data efficiency while the latter is difficult when test tasks are out-of-distribution. Agents that can effectively transfer their knowledge about the world pose a potential solution to these issues. In this paper, we investigate transfer learning in the context of model-based agents. Specifically, we aim to understand when exactly environment models have an advantage and why. We find that a model-based approach outperforms controlled model-free baselines for transfer learning. Through ablations, we show that both the policy and dynamics model learnt through exploration matter for successful transfer. We demonstrate our results across three domains which vary in their requirements for transfer: in-distribution procedural (Crafter), in-distribution identical (RoboDesk), and out-of-distribution (Meta-World). Our results show that intrinsic exploration combined with environment models present a viable direction towards agents that are self-supervised and able to generalize to novel reward functions.
Getting the Ball Rolling: Learning a Dexterous Policy for a Biomimetic Tendon-Driven Hand with Rolling Contact Joints
Biomimetic, dexterous robotic hands have the potential to replicate much of the tasks that a human can do, and to achieve status as a general manipulation platform. Recent advances in reinforcement learning (RL) frameworks have achieved remarkable performance in quadrupedal locomotion and dexterous manipulation tasks. Combined with GPU-based highly parallelized simulations capable of simulating thousands of robots in parallel, RL-based controllers have become more scalable and approachable. However, in order to bring RL-trained policies to the real world, we require training frameworks that output policies that can work with physical actuators and sensors as well as a hardware platform that can be manufactured with accessible materials yet is robust enough to run interactive policies. This work introduces the biomimetic tendon-driven Faive Hand and its system architecture, which uses tendon-driven rolling contact joints to achieve a 3D printable, robust high-DoF hand design. We model each element of the hand and integrate it into a GPU simulation environment to train a policy with RL, and achieve zero-shot transfer of a dexterous in-hand sphere rotation skill to the physical robot hand.





LIBERO: Benchmarking Knowledge Transfer for Lifelong Robot Learning
Lifelong learning offers a promising paradigm of building a generalist agent that learns and adapts over its lifespan. Unlike traditional lifelong learning problems in image and text domains, which primarily involve the transfer of declarative knowledge of entities and concepts, lifelong learning in decision-making (LLDM) also necessitates the transfer of procedural knowledge, such as actions and behaviors. To advance research in LLDM, we introduce LIBERO, a novel benchmark of lifelong learning for robot manipulation. Specifically, LIBERO highlights five key research topics in LLDM: 1) how to efficiently transfer declarative knowledge, procedural knowledge, or the mixture of both; 2) how to design effective policy architectures and 3) effective algorithms for LLDM; 4) the robustness of a lifelong learner with respect to task ordering; and 5) the effect of model pretraining for LLDM. We develop an extendible procedural generation pipeline that can in principle generate infinitely many tasks. For benchmarking purpose, we create four task suites (130 tasks in total) that we use to investigate the above-mentioned research topics. To support sample-efficient learning, we provide high-quality human-teleoperated demonstration data for all tasks. Our extensive experiments present several insightful or even unexpected discoveries: sequential finetuning outperforms existing lifelong learning methods in forward transfer, no single visual encoder architecture excels at all types of knowledge transfer, and naive supervised pretraining can hinder agents' performance in the subsequent LLDM. Check the website at https://libero-project.github.io for the code and the datasets.
Agile Catching with Whole-Body MPC and Blackbox Policy Learning
We address a benchmark task in agile robotics: catching objects thrown at high-speed. This is a challenging task that involves tracking, intercepting, and cradling a thrown object with access only to visual observations of the object and the proprioceptive state of the robot, all within a fraction of a second. We present the relative merits of two fundamentally different solution strategies: (i) Model Predictive Control using accelerated constrained trajectory optimization, and (ii) Reinforcement Learning using zeroth-order optimization. We provide insights into various performance trade-offs including sample efficiency, sim-to-real transfer, robustness to distribution shifts, and whole-body multimodality via extensive on-hardware experiments. We conclude with proposals on fusing "classical" and "learning-based" techniques for agile robot control. Videos of our experiments may be found at https://sites.google.com/view/agile-catching




AnyTask: an Automated Task and Data Generation Framework for Advancing Sim-to-Real Policy Learning
Generalist robot learning remains constrained by data: large-scale, diverse, and high-quality interaction data are expensive to collect in the real world. While simulation has become a promising way for scaling up data collection, the related tasks, including simulation task design, task-aware scene generation, expert demonstration synthesis, and sim-to-real transfer, still demand substantial human effort. We present AnyTask, an automated framework that pairs massively parallel GPU simulation with foundation models to design diverse manipulation tasks and synthesize robot data. We introduce three AnyTask agents for generating expert demonstrations aiming to solve as many tasks as possible: 1) ViPR, a novel task and motion planning agent with VLM-in-the-loop Parallel Refinement; 2) ViPR-Eureka, a reinforcement learning agent with generated dense rewards and LLM-guided contact sampling; 3) ViPR-RL, a hybrid planning and learning approach that jointly produces high-quality demonstrations with only sparse rewards. We train behavior cloning policies on generated data, validate them in simulation, and deploy them directly on real robot hardware. The policies generalize to novel object poses, achieving 44% average success across a suite of real-world pick-and-place, drawer opening, contact-rich pushing, and long-horizon manipulation tasks. Our project website is at https://anytask.rai-inst.com .
On the Feasibility of Cross-Task Transfer with Model-Based Reinforcement Learning
Reinforcement Learning (RL) algorithms can solve challenging control problems directly from image observations, but they often require millions of environment interactions to do so. Recently, model-based RL algorithms have greatly improved sample-efficiency by concurrently learning an internal model of the world, and supplementing real environment interactions with imagined rollouts for policy improvement. However, learning an effective model of the world from scratch is challenging, and in stark contrast to humans that rely heavily on world understanding and visual cues for learning new skills. In this work, we investigate whether internal models learned by modern model-based RL algorithms can be leveraged to solve new, distinctly different tasks faster. We propose Model-Based Cross-Task Transfer (XTRA), a framework for sample-efficient online RL with scalable pretraining and finetuning of learned world models. By offline multi-task pretraining and online cross-task finetuning, we achieve substantial improvements over a baseline trained from scratch; we improve mean performance of model-based algorithm EfficientZero by 23%, and by as much as 71% in some instances.


Uni-O4: Unifying Online and Offline Deep Reinforcement Learning with Multi-Step On-Policy Optimization
Combining offline and online reinforcement learning (RL) is crucial for efficient and safe learning. However, previous approaches treat offline and online learning as separate procedures, resulting in redundant designs and limited performance. We ask: Can we achieve straightforward yet effective offline and online learning without introducing extra conservatism or regularization? In this study, we propose Uni-o4, which utilizes an on-policy objective for both offline and online learning. Owning to the alignment of objectives in two phases, the RL agent can transfer between offline and online learning seamlessly. This property enhances the flexibility of the learning paradigm, allowing for arbitrary combinations of pretraining, fine-tuning, offline, and online learning. In the offline phase, specifically, Uni-o4 leverages diverse ensemble policies to address the mismatch issues between the estimated behavior policy and the offline dataset. Through a simple offline policy evaluation (OPE) approach, Uni-o4 can achieve multi-step policy improvement safely. We demonstrate that by employing the method above, the fusion of these two paradigms can yield superior offline initialization as well as stable and rapid online fine-tuning capabilities. Through real-world robot tasks, we highlight the benefits of this paradigm for rapid deployment in challenging, previously unseen real-world environments. Additionally, through comprehensive evaluations using numerous simulated benchmarks, we substantiate that our method achieves state-of-the-art performance in both offline and offline-to-online fine-tuning learning. Our website: https://lei-kun.github.io/uni-o4/ .

Sparse Diffusion Policy: A Sparse, Reusable, and Flexible Policy for Robot Learning
The increasing complexity of tasks in robotics demands efficient strategies for multitask and continual learning. Traditional models typically rely on a universal policy for all tasks, facing challenges such as high computational costs and catastrophic forgetting when learning new tasks. To address these issues, we introduce a sparse, reusable, and flexible policy, Sparse Diffusion Policy (SDP). By adopting Mixture of Experts (MoE) within a transformer-based diffusion policy, SDP selectively activates experts and skills, enabling efficient and task-specific learning without retraining the entire model. SDP not only reduces the burden of active parameters but also facilitates the seamless integration and reuse of experts across various tasks. Extensive experiments on diverse tasks in both simulations and real world show that SDP 1) excels in multitask scenarios with negligible increases in active parameters, 2) prevents forgetting in continual learning of new tasks, and 3) enables efficient task transfer, offering a promising solution for advanced robotic applications. Demos and codes can be found in https://forrest-110.github.io/sparse_diffusion_policy/.

OXE-AugE: A Large-Scale Robot Augmentation of OXE for Scaling Cross-Embodiment Policy Learning
Large and diverse datasets are needed for training generalist robot policies that have potential to control a variety of robot embodiments -- robot arm and gripper combinations -- across diverse tasks and environments. As re-collecting demonstrations and retraining for each new hardware platform are prohibitively costly, we show that existing robot data can be augmented for transfer and generalization. The Open X-Embodiment (OXE) dataset, which aggregates demonstrations from over 60 robot datasets, has been widely used as the foundation for training generalist policies. However, it is highly imbalanced: the top four robot types account for over 85\% of its real data, which risks overfitting to robot-scene combinations. We present AugE-Toolkit, a scalable robot augmentation pipeline, and OXE-AugE, a high-quality open-source dataset that augments OXE with 9 different robot embodiments. OXE-AugE provides over 4.4 million trajectories, more than triple the size of the original OXE. We conduct a systematic study of how scaling robot augmentation impacts cross-embodiment learning. Results suggest that augmenting datasets with diverse arms and grippers improves policy performance not only on the augmented robots, but also on unseen robots and even the original robots under distribution shifts. In physical experiments, we demonstrate that state-of-the-art generalist policies such as OpenVLA and π_0 benefit from fine-tuning on OXE-AugE, improving success rates by 24-45% on previously unseen robot-gripper combinations across four real-world manipulation tasks. Project website: https://OXE-AugE.github.io/.
Learning Vision-Guided Quadrupedal Locomotion End-to-End with Cross-Modal Transformers
We propose to address quadrupedal locomotion tasks using Reinforcement Learning (RL) with a Transformer-based model that learns to combine proprioceptive information and high-dimensional depth sensor inputs. While learning-based locomotion has made great advances using RL, most methods still rely on domain randomization for training blind agents that generalize to challenging terrains. Our key insight is that proprioceptive states only offer contact measurements for immediate reaction, whereas an agent equipped with visual sensory observations can learn to proactively maneuver environments with obstacles and uneven terrain by anticipating changes in the environment many steps ahead. In this paper, we introduce LocoTransformer, an end-to-end RL method that leverages both proprioceptive states and visual observations for locomotion control. We evaluate our method in challenging simulated environments with different obstacles and uneven terrain. We transfer our learned policy from simulation to a real robot by running it indoors and in the wild with unseen obstacles and terrain. Our method not only significantly improves over baselines, but also achieves far better generalization performance, especially when transferred to the real robot. Our project page with videos is at https://rchalyang.github.io/LocoTransformer/ .
Sim2Real Reinforcement Learning for Soccer skills
This thesis work presents a more efficient and effective approach to training control-related tasks for humanoid robots using Reinforcement Learning (RL). The traditional RL methods are limited in adapting to real-world environments, complexity, and natural motions, but the proposed approach overcomes these limitations by using curriculum training and Adversarial Motion Priors (AMP) technique. The results show that the developed RL policies for kicking, walking, and jumping are more dynamic, and adaptive, and outperformed previous methods. However, the transfer of the learned policy from simulation to the real world was unsuccessful, highlighting the limitations of current RL methods in fully adapting to real-world scenarios.

Manipulate-to-Navigate: Reinforcement Learning with Visual Affordances and Manipulability Priors
Mobile manipulation in dynamic environments is challenging due to movable obstacles blocking the robot's path. Traditional methods, which treat navigation and manipulation as separate tasks, often fail in such 'manipulate-to-navigate' scenarios, as obstacles must be removed before navigation. In these cases, active interaction with the environment is required to clear obstacles while ensuring sufficient space for movement. To address the manipulate-to-navigate problem, we propose a reinforcement learning-based approach for learning manipulation actions that facilitate subsequent navigation. Our method combines manipulability priors to focus the robot on high manipulability body positions with affordance maps for selecting high-quality manipulation actions. By focusing on feasible and meaningful actions, our approach reduces unnecessary exploration and allows the robot to learn manipulation strategies more effectively. We present two new manipulate-to-navigate simulation tasks called Reach and Door with the Boston Dynamics Spot robot. The first task tests whether the robot can select a good hand position in the target area such that the robot base can move effectively forward while keeping the end effector position fixed. The second task requires the robot to move a door aside in order to clear the navigation path. Both of these tasks need first manipulation and then navigating the base forward. Results show that our method allows a robot to effectively interact with and traverse dynamic environments. Finally, we transfer the learned policy to a real Boston Dynamics Spot robot, which successfully performs the Reach task.
ArrayBot: Reinforcement Learning for Generalizable Distributed Manipulation through Touch
We present ArrayBot, a distributed manipulation system consisting of a 16 times 16 array of vertically sliding pillars integrated with tactile sensors, which can simultaneously support, perceive, and manipulate the tabletop objects. Towards generalizable distributed manipulation, we leverage reinforcement learning (RL) algorithms for the automatic discovery of control policies. In the face of the massively redundant actions, we propose to reshape the action space by considering the spatially local action patch and the low-frequency actions in the frequency domain. With this reshaped action space, we train RL agents that can relocate diverse objects through tactile observations only. Surprisingly, we find that the discovered policy can not only generalize to unseen object shapes in the simulator but also transfer to the physical robot without any domain randomization. Leveraging the deployed policy, we present abundant real-world manipulation tasks, illustrating the vast potential of RL on ArrayBot for distributed manipulation.



From Language to Goals: Inverse Reinforcement Learning for Vision-Based Instruction Following
Reinforcement learning is a promising framework for solving control problems, but its use in practical situations is hampered by the fact that reward functions are often difficult to engineer. Specifying goals and tasks for autonomous machines, such as robots, is a significant challenge: conventionally, reward functions and goal states have been used to communicate objectives. But people can communicate objectives to each other simply by describing or demonstrating them. How can we build learning algorithms that will allow us to tell machines what we want them to do? In this work, we investigate the problem of grounding language commands as reward functions using inverse reinforcement learning, and argue that language-conditioned rewards are more transferable than language-conditioned policies to new environments. We propose language-conditioned reward learning (LC-RL), which grounds language commands as a reward function represented by a deep neural network. We demonstrate that our model learns rewards that transfer to novel tasks and environments on realistic, high-dimensional visual environments with natural language commands, whereas directly learning a language-conditioned policy leads to poor performance.
OVD: On-policy Verbal Distillation
Knowledge distillation offers a promising path to transfer reasoning capabilities from large teacher models to efficient student models; however, existing token-level on-policy distillation methods require token-level alignment between the student and teacher models, which restricts the student model's exploration ability, prevent effective use of interactive environment feedback, and suffer from severe memory bottlenecks in reinforcement learning. We introduce On-policy Verbal Distillation (OVD), a memory-efficient framework that replaces token-level probability matching with trajectory matching using discrete verbal scores (0--9) from teacher models. OVD dramatically reduces memory consumption while enabling on-policy distillation from teacher models with verbal feedback, and avoids token-level alignment, allowing the student model to freely explore the output space. Extensive experiments on Web question answering and mathematical reasoning tasks show that OVD substantially outperforms existing methods, delivering up to +12.9% absolute improvement in average EM on Web Q&A tasks and a up to +25.7% gain on math benchmarks (when trained with only one random samples), while also exhibiting superior training efficiency. Our project page is available at https://OVD.github.io
Retrieval-based Knowledge Transfer: An Effective Approach for Extreme Large Language Model Compression
Large-scale pre-trained language models (LLMs) have demonstrated exceptional performance in various natural language processing (NLP) tasks. However, the massive size of these models poses huge challenges for their deployment in real-world applications. While numerous model compression techniques have been proposed, most of them are not well-suited for achieving extreme model compression when there is a significant gap in model scale. In this paper, we introduce a novel compression paradigm called Retrieval-based Knowledge Transfer (RetriKT), which effectively transfers the knowledge of LLMs to extremely small-scale models (e.g., 1%). In particular, our approach extracts knowledge from LLMs to construct a knowledge store, from which the small-scale model can retrieve relevant information and leverage it for effective inference. To improve the quality of the model, soft prompt tuning and Proximal Policy Optimization (PPO) reinforcement learning techniques are employed. Extensive experiments are conducted on low-resource tasks from SuperGLUE and GLUE benchmarks. The results demonstrate that the proposed approach significantly enhances the performance of small-scale models by leveraging the knowledge from LLMs.


STEER: Unified Style Transfer with Expert Reinforcement
While text style transfer has many applications across natural language processing, the core premise of transferring from a single source style is unrealistic in a real-world setting. In this work, we focus on arbitrary style transfer: rewriting a text from an arbitrary, unknown style to a target style. We propose STEER: Unified Style Transfer with Expert Reinforcement, a unified frame-work developed to overcome the challenge of limited parallel data for style transfer. STEER involves automatically generating a corpus of style-transfer pairs using a product of experts during decoding. The generated offline data is then used to pre-train an initial policy before switching to online, off-policy reinforcement learning for further improvements via fine-grained reward signals. STEER is unified and can transfer to multiple target styles from an arbitrary, unknown source style, making it particularly flexible and efficient. Experimental results on a challenging dataset with text from a diverse set of styles demonstrate state-of-the-art results compared to competitive baselines. Remarkably, STEER outperforms the 175B parameter instruction-tuned GPT-3 on overall style transfer quality, despite being 226 times smaller in size. We also show STEER is robust, maintaining its style transfer capabilities on out-of-domain data, and surpassing nearly all baselines across various styles. The success of our method highlights the potential of RL algorithms when augmented with controllable decoding to overcome the challenge of limited data supervision.


Sparks of Tabular Reasoning via Text2SQL Reinforcement Learning
This work reframes the Text-to-SQL task as a pathway for teaching large language models (LLMs) to reason over and manipulate tabular data--moving beyond the traditional focus on query generation. We propose a two-stage framework that leverages SQL supervision to develop transferable table reasoning capabilities. First, we synthesize detailed chain-of-thought (CoT) traces from real-world SQL queries, providing step-by-step, clause-level supervision that teaches the model how to traverse, filter, and aggregate table fields. Second, we introduce a Group Relative Policy Optimization (GRPO) reinforcement learning objective that connects SQL execution accuracy to generalizable reasoning by encouraging steps that extend beyond task-specific syntax and transfer across datasets. Empirically, our approach improves performance on standard Text-to-SQL benchmarks and achieves substantial gains on reasoning-intensive datasets such as BIRD and CRT-QA, demonstrating enhanced generalization and interpretability. Specifically, the distilled-quantized LLaMA model achieved a relative 33.9\% increase in accuracy when trained on Text-to-SQL tasks, while Qwen achieved a relative 14.5\% increase. These results suggest that SQL can serve not only as a target formalism but also as an effective scaffold for learning robust, transferable reasoning over structured data.
Robust Adversarial Reinforcement Learning
Deep neural networks coupled with fast simulation and improved computation have led to recent successes in the field of reinforcement learning (RL). However, most current RL-based approaches fail to generalize since: (a) the gap between simulation and real world is so large that policy-learning approaches fail to transfer; (b) even if policy learning is done in real world, the data scarcity leads to failed generalization from training to test scenarios (e.g., due to different friction or object masses). Inspired from H-infinity control methods, we note that both modeling errors and differences in training and test scenarios can be viewed as extra forces/disturbances in the system. This paper proposes the idea of robust adversarial reinforcement learning (RARL), where we train an agent to operate in the presence of a destabilizing adversary that applies disturbance forces to the system. The jointly trained adversary is reinforced -- that is, it learns an optimal destabilization policy. We formulate the policy learning as a zero-sum, minimax objective function. Extensive experiments in multiple environments (InvertedPendulum, HalfCheetah, Swimmer, Hopper and Walker2d) conclusively demonstrate that our method (a) improves training stability; (b) is robust to differences in training/test conditions; and c) outperform the baseline even in the absence of the adversary.
UniT: Unified Tactile Representation for Robot Learning
UniT is a novel approach to tactile representation learning, using VQVAE to learn a compact latent space and serve as the tactile representation. It uses tactile images obtained from a single simple object to train the representation with transferability and generalizability. This tactile representation can be zero-shot transferred to various downstream tasks, including perception tasks and manipulation policy learning. Our benchmarking on an in-hand 3D pose estimation task shows that UniT outperforms existing visual and tactile representation learning methods. Additionally, UniT's effectiveness in policy learning is demonstrated across three real-world tasks involving diverse manipulated objects and complex robot-object-environment interactions. Through extensive experimentation, UniT is shown to be a simple-to-train, plug-and-play, yet widely effective method for tactile representation learning. For more details, please refer to our open-source repository https://github.com/ZhengtongXu/UniT and the project website https://zhengtongxu.github.io/unifiedtactile.github.io/.




TacSL: A Library for Visuotactile Sensor Simulation and Learning
For both humans and robots, the sense of touch, known as tactile sensing, is critical for performing contact-rich manipulation tasks. Three key challenges in robotic tactile sensing are 1) interpreting sensor signals, 2) generating sensor signals in novel scenarios, and 3) learning sensor-based policies. For visuotactile sensors, interpretation has been facilitated by their close relationship with vision sensors (e.g., RGB cameras). However, generation is still difficult, as visuotactile sensors typically involve contact, deformation, illumination, and imaging, all of which are expensive to simulate; in turn, policy learning has been challenging, as simulation cannot be leveraged for large-scale data collection. We present TacSL (taxel), a library for GPU-based visuotactile sensor simulation and learning. TacSL can be used to simulate visuotactile images and extract contact-force distributions over 200times faster than the prior state-of-the-art, all within the widely-used Isaac Gym simulator. Furthermore, TacSL provides a learning toolkit containing multiple sensor models, contact-intensive training environments, and online/offline algorithms that can facilitate policy learning for sim-to-real applications. On the algorithmic side, we introduce a novel online reinforcement-learning algorithm called asymmetric actor-critic distillation (\sysName), designed to effectively and efficiently learn tactile-based policies in simulation that can transfer to the real world. Finally, we demonstrate the utility of our library and algorithms by evaluating the benefits of distillation and multimodal sensing for contact-rich manip ulation tasks, and most critically, performing sim-to-real transfer. Supplementary videos and results are at https://iakinola23.github.io/tacsl/.

Towards Fast, Memory-based and Data-Efficient Vision-Language Policy
Vision Language Models (VLMs) pretrained on Internet-scale vision-language data have demonstrated the potential to transfer their knowledge to robotic learning. However, the existing paradigm encounters three critical challenges: (1) expensive inference cost resulting from large-scale model parameters, (2) frequent domain shifts caused by mismatched data modalities, and (3) limited capacity to handle past or future experiences. In this work, we propose LiteVLP, a lightweight, memory-based, and general-purpose vision-language policy generation model. LiteVLP is built upon a pre-trained 1B-parameter VLM and fine-tuned on a tiny-scale and conversation-style robotic dataset. Through extensive experiments, we demonstrate that LiteVLP outperforms state-of-the-art vision-language policy on VIMA-Bench, with minimal training time. Furthermore, LiteVLP exhibits superior inference speed while maintaining exceptional high accuracy. In long-horizon manipulation tasks, LiteVLP also shows remarkable memory ability, outperforming the best-performing baseline model by 18.8%. These results highlight LiteVLP as a promising model to integrating the intelligence of VLMs into robotic learning.
RLMiniStyler: Light-weight RL Style Agent for Arbitrary Sequential Neural Style Generation
Arbitrary style transfer aims to apply the style of any given artistic image to another content image. Still, existing deep learning-based methods often require significant computational costs to generate diverse stylized results. Motivated by this, we propose a novel reinforcement learning-based framework for arbitrary style transfer RLMiniStyler. This framework leverages a unified reinforcement learning policy to iteratively guide the style transfer process by exploring and exploiting stylization feedback, generating smooth sequences of stylized results while achieving model lightweight. Furthermore, we introduce an uncertainty-aware multi-task learning strategy that automatically adjusts loss weights to adapt to the content and style balance requirements at different training stages, thereby accelerating model convergence. Through a series of experiments across image various resolutions, we have validated the advantages of RLMiniStyler over other state-of-the-art methods in generating high-quality, diverse artistic image sequences at a lower cost. Codes are available at https://github.com/fengxiaoming520/RLMiniStyler.
DexUMI: Using Human Hand as the Universal Manipulation Interface for Dexterous Manipulation
We present DexUMI - a data collection and policy learning framework that uses the human hand as the natural interface to transfer dexterous manipulation skills to various robot hands. DexUMI includes hardware and software adaptations to minimize the embodiment gap between the human hand and various robot hands. The hardware adaptation bridges the kinematics gap using a wearable hand exoskeleton. It allows direct haptic feedback in manipulation data collection and adapts human motion to feasible robot hand motion. The software adaptation bridges the visual gap by replacing the human hand in video data with high-fidelity robot hand inpainting. We demonstrate DexUMI's capabilities through comprehensive real-world experiments on two different dexterous robot hand hardware platforms, achieving an average task success rate of 86%.

Universal Manipulation Interface: In-The-Wild Robot Teaching Without In-The-Wild Robots
We present Universal Manipulation Interface (UMI) -- a data collection and policy learning framework that allows direct skill transfer from in-the-wild human demonstrations to deployable robot policies. UMI employs hand-held grippers coupled with careful interface design to enable portable, low-cost, and information-rich data collection for challenging bimanual and dynamic manipulation demonstrations. To facilitate deployable policy learning, UMI incorporates a carefully designed policy interface with inference-time latency matching and a relative-trajectory action representation. The resulting learned policies are hardware-agnostic and deployable across multiple robot platforms. Equipped with these features, UMI framework unlocks new robot manipulation capabilities, allowing zero-shot generalizable dynamic, bimanual, precise, and long-horizon behaviors, by only changing the training data for each task. We demonstrate UMI's versatility and efficacy with comprehensive real-world experiments, where policies learned via UMI zero-shot generalize to novel environments and objects when trained on diverse human demonstrations. UMI's hardware and software system is open-sourced at https://umi-gripper.github.io.



Look, Zoom, Understand: The Robotic Eyeball for Embodied Perception
In embodied AI perception systems, visual perception should be active: the goal is not to passively process static images, but to actively acquire more informative data within pixel and spatial budget constraints. Existing vision models and fixed RGB-D camera systems fundamentally fail to reconcile wide-area coverage with fine-grained detail acquisition, severely limiting their efficacy in open-world robotic applications. To address this issue, we propose EyeVLA, a robotic eyeball for active visual perception that can take proactive actions based on instructions, enabling clear observation of fine-grained target objects and detailed information across a wide spatial extent. EyeVLA discretizes action behaviors into action tokens and integrates them with vision-language models (VLMs) that possess strong open-world understanding capabilities, enabling joint modeling of vision, language, and actions within a single autoregressive sequence. By using the 2D bounding box coordinates to guide the reasoning chain and applying reinforcement learning to refine the viewpoint selection policy, we transfer the open-world scene understanding capability of the VLM to a vision language action (VLA) policy using only minimal real-world data. Experiments show that our system efficiently performs instructed scenes in real-world environments and actively acquires more accurate visual information through instruction-driven actions of rotation and zoom, thereby achieving strong environmental perception capabilities. EyeVLA introduces a novel robotic vision system that leverages detailed and spatially rich, large-scale embodied data, and actively acquires highly informative visual observations for downstream embodied tasks.
Unified Vision-Language-Action Model
Vision-language-action models (VLAs) have garnered significant attention for their potential in advancing robotic manipulation. However, previous approaches predominantly rely on the general comprehension capabilities of vision-language models (VLMs) to generate action signals, often overlooking the rich temporal and causal structure embedded in visual observations. In this paper, we present UniVLA, a unified and native multimodal VLA model that autoregressively models vision, language, and action signals as discrete token sequences. This formulation enables flexible multimodal tasks learning, particularly from large-scale video data. By incorporating world modeling during post-training, UniVLA captures causal dynamics from videos, facilitating effective transfer to downstream policy learning--especially for long-horizon tasks. Our approach sets new state-of-the-art results across several widely used simulation benchmarks, including CALVIN, LIBERO, and Simplenv-Bridge, significantly surpassing previous methods. For example, UniVLA achieves 95.5% average success rate on LIBERO benchmark, surpassing pi0-FAST's 85.5%. We further demonstrate its broad applicability on real-world ALOHA manipulation and autonomous driving.



MagiClaw: A Dual-Use, Vision-Based Soft Gripper for Bridging the Human Demonstration to Robotic Deployment Gap
The transfer of manipulation skills from human demonstration to robotic execution is often hindered by a "domain gap" in sensing and morphology. This paper introduces MagiClaw, a versatile two-finger end-effector designed to bridge this gap. MagiClaw functions interchangeably as both a handheld tool for intuitive data collection and a robotic end-effector for policy deployment, ensuring hardware consistency and reliability. Each finger incorporates a Soft Polyhedral Network (SPN) with an embedded camera, enabling vision-based estimation of 6-DoF forces and contact deformation. This proprioceptive data is fused with exteroceptive environmental sensing from an integrated iPhone, which provides 6D pose, RGB video, and LiDAR-based depth maps. Through a custom iOS application, MagiClaw streams synchronized, multi-modal data for real-time teleoperation, offline policy learning, and immersive control via mixed-reality interfaces. We demonstrate how this unified system architecture lowers the barrier to collecting high-fidelity, contact-rich datasets and accelerates the development of generalizable manipulation policies. Please refer to the iOS app at https://apps.apple.com/cn/app/magiclaw/id6661033548 for further details.

Is Diversity All You Need for Scalable Robotic Manipulation?
Data scaling has driven remarkable success in foundation models for Natural Language Processing (NLP) and Computer Vision (CV), yet the principles of effective data scaling in robotic manipulation remain insufficiently understood. In this work, we investigate the nuanced role of data diversity in robot learning by examining three critical dimensions-task (what to do), embodiment (which robot to use), and expert (who demonstrates)-challenging the conventional intuition of "more diverse is better". Throughout extensive experiments on various robot platforms, we reveal that (1) task diversity proves more critical than per-task demonstration quantity, benefiting transfer from diverse pre-training tasks to novel downstream scenarios; (2) multi-embodiment pre-training data is optional for cross-embodiment transfer-models trained on high-quality single-embodiment data can efficiently transfer to different platforms, showing more desirable scaling property during fine-tuning than multi-embodiment pre-trained models; and (3) expert diversity, arising from individual operational preferences and stochastic variations in human demonstrations, can be confounding to policy learning, with velocity multimodality emerging as a key contributing factor. Based on this insight, we propose a distribution debiasing method to mitigate velocity ambiguity, the yielding GO-1-Pro achieves substantial performance gains of 15%, equivalent to using 2.5 times pre-training data. Collectively, these findings provide new perspectives and offer practical guidance on how to scale robotic manipulation datasets effectively.




ObjectVLA: End-to-End Open-World Object Manipulation Without Demonstration
Imitation learning has proven to be highly effective in teaching robots dexterous manipulation skills. However, it typically relies on large amounts of human demonstration data, which limits its scalability and applicability in dynamic, real-world environments. One key challenge in this context is object generalization, where a robot trained to perform a task with one object, such as "hand over the apple," struggles to transfer its skills to a semantically similar but visually different object, such as "hand over the peach." This gap in generalization to new objects beyond those in the same category has yet to be adequately addressed in previous work on end-to-end visuomotor policy learning. In this paper, we present a simple yet effective approach for achieving object generalization through Vision-Language-Action (VLA) models, referred to as ObjectVLA. Our model enables robots to generalize learned skills to novel objects without requiring explicit human demonstrations for each new target object. By leveraging vision-language pair data, our method provides a lightweight and scalable way to inject knowledge about the target object, establishing an implicit link between the object and the desired action. We evaluate ObjectVLA on a real robotic platform, demonstrating its ability to generalize across 100 novel objects with a 64\% success rate in selecting objects not seen during training. Furthermore, we propose a more accessible method for enhancing object generalization in VLA models, using a smartphone to capture a few images and fine-tune the pre-trained model. These results highlight the effectiveness of our approach in enabling object-level generalization and reducing the need for extensive human demonstrations, paving the way for more flexible and scalable robotic learning systems.
NeuPL: Neural Population Learning
Learning in strategy games (e.g. StarCraft, poker) requires the discovery of diverse policies. This is often achieved by iteratively training new policies against existing ones, growing a policy population that is robust to exploit. This iterative approach suffers from two issues in real-world games: a) under finite budget, approximate best-response operators at each iteration needs truncating, resulting in under-trained good-responses populating the population; b) repeated learning of basic skills at each iteration is wasteful and becomes intractable in the presence of increasingly strong opponents. In this work, we propose Neural Population Learning (NeuPL) as a solution to both issues. NeuPL offers convergence guarantees to a population of best-responses under mild assumptions. By representing a population of policies within a single conditional model, NeuPL enables transfer learning across policies. Empirically, we show the generality, improved performance and efficiency of NeuPL across several test domains. Most interestingly, we show that novel strategies become more accessible, not less, as the neural population expands.

Robust Tickets Can Transfer Better: Drawing More Transferable Subnetworks in Transfer Learning
Transfer learning leverages feature representations of deep neural networks (DNNs) pretrained on source tasks with rich data to empower effective finetuning on downstream tasks. However, the pretrained models are often prohibitively large for delivering generalizable representations, which limits their deployment on edge devices with constrained resources. To close this gap, we propose a new transfer learning pipeline, which leverages our finding that robust tickets can transfer better, i.e., subnetworks drawn with properly induced adversarial robustness can win better transferability over vanilla lottery ticket subnetworks. Extensive experiments and ablation studies validate that our proposed transfer learning pipeline can achieve enhanced accuracy-sparsity trade-offs across both diverse downstream tasks and sparsity patterns, further enriching the lottery ticket hypothesis.


An Embarrassingly Simple Approach for Transfer Learning from Pretrained Language Models
A growing number of state-of-the-art transfer learning methods employ language models pretrained on large generic corpora. In this paper we present a conceptually simple and effective transfer learning approach that addresses the problem of catastrophic forgetting. Specifically, we combine the task-specific optimization function with an auxiliary language model objective, which is adjusted during the training process. This preserves language regularities captured by language models, while enabling sufficient adaptation for solving the target task. Our method does not require pretraining or finetuning separate components of the network and we train our models end-to-end in a single step. We present results on a variety of challenging affective and text classification tasks, surpassing well established transfer learning methods with greater level of complexity.


Auto-Transfer: Learning to Route Transferrable Representations
Knowledge transfer between heterogeneous source and target networks and tasks has received a lot of attention in recent times as large amounts of quality labeled data can be difficult to obtain in many applications. Existing approaches typically constrain the target deep neural network (DNN) feature representations to be close to the source DNNs feature representations, which can be limiting. We, in this paper, propose a novel adversarial multi-armed bandit approach that automatically learns to route source representations to appropriate target representations following which they are combined in meaningful ways to produce accurate target models. We see upwards of 5\% accuracy improvements compared with the state-of-the-art knowledge transfer methods on four benchmark (target) image datasets CUB200, Stanford Dogs, MIT67, and Stanford40 where the source dataset is ImageNet. We qualitatively analyze the goodness of our transfer scheme by showing individual examples of the important features focused on by our target network at different layers compared with the (closest) competitors. We also observe that our improvement over other methods is higher for smaller target datasets making it an effective tool for small data applications that may benefit from transfer learning.


Exploring the Limits of Transfer Learning with a Unified Text-to-Text Transformer
Transfer learning, where a model is first pre-trained on a data-rich task before being fine-tuned on a downstream task, has emerged as a powerful technique in natural language processing (NLP). The effectiveness of transfer learning has given rise to a diversity of approaches, methodology, and practice. In this paper, we explore the landscape of transfer learning techniques for NLP by introducing a unified framework that converts all text-based language problems into a text-to-text format. Our systematic study compares pre-training objectives, architectures, unlabeled data sets, transfer approaches, and other factors on dozens of language understanding tasks. By combining the insights from our exploration with scale and our new ``Colossal Clean Crawled Corpus'', we achieve state-of-the-art results on many benchmarks covering summarization, question answering, text classification, and more. To facilitate future work on transfer learning for NLP, we release our data set, pre-trained models, and code.



Model-Based Transfer Learning for Contextual Reinforcement Learning
Deep reinforcement learning (RL) is a powerful approach to complex decision making. However, one issue that limits its practical application is its brittleness, sometimes failing to train in the presence of small changes in the environment. Motivated by the success of zero-shot transfer-where pre-trained models perform well on related tasks-we consider the problem of selecting a good set of training tasks to maximize generalization performance across a range of tasks. Given the high cost of training, it is critical to select training tasks strategically, but not well understood how to do so. We hence introduce Model-Based Transfer Learning (MBTL), which layers on top of existing RL methods to effectively solve contextual RL problems. MBTL models the generalization performance in two parts: 1) the performance set point, modeled using Gaussian processes, and 2) performance loss (generalization gap), modeled as a linear function of contextual similarity. MBTL combines these two pieces of information within a Bayesian optimization (BO) framework to strategically select training tasks. We show theoretically that the method exhibits sublinear regret in the number of training tasks and discuss conditions to further tighten regret bounds. We experimentally validate our methods using urban traffic and standard continuous control benchmarks. The experimental results suggest that MBTL can achieve up to 50x improved sample efficiency compared with canonical independent training and multi-task training. Further experiments demonstrate the efficacy of BO and the insensitivity to the underlying RL algorithm and hyperparameters. This work lays the foundations for investigating explicit modeling of generalization, thereby enabling principled yet effective methods for contextual RL.


On The Transferability of Deep-Q Networks
Transfer Learning (TL) is an efficient machine learning paradigm that allows overcoming some of the hurdles that characterize the successful training of deep neural networks, ranging from long training times to the needs of large datasets. While exploiting TL is a well established and successful training practice in Supervised Learning (SL), its applicability in Deep Reinforcement Learning (DRL) is rarer. In this paper, we study the level of transferability of three different variants of Deep-Q Networks on popular DRL benchmarks as well as on a set of novel, carefully designed control tasks. Our results show that transferring neural networks in a DRL context can be particularly challenging and is a process which in most cases results in negative transfer. In the attempt of understanding why Deep-Q Networks transfer so poorly, we gain novel insights into the training dynamics that characterizes this family of algorithms.

Data Quality in Imitation Learning
In supervised learning, the question of data quality and curation has been over-shadowed in recent years by increasingly more powerful and expressive models that can ingest internet-scale data. However, in offline learning for robotics, we simply lack internet scale data, and so high quality datasets are a necessity. This is especially true in imitation learning (IL), a sample efficient paradigm for robot learning using expert demonstrations. Policies learned through IL suffer from state distribution shift at test time due to compounding errors in action prediction, which leads to unseen states that the policy cannot recover from. Instead of designing new algorithms to address distribution shift, an alternative perspective is to develop new ways of assessing and curating datasets. There is growing evidence that the same IL algorithms can have substantially different performance across different datasets. This calls for a formalism for defining metrics of "data quality" that can further be leveraged for data curation. In this work, we take the first step toward formalizing data quality for imitation learning through the lens of distribution shift: a high quality dataset encourages the policy to stay in distribution at test time. We propose two fundamental properties that shape the quality of a dataset: i) action divergence: the mismatch between the expert and learned policy at certain states; and ii) transition diversity: the noise present in the system for a given state and action. We investigate the combined effect of these two key properties in imitation learning theoretically, and we empirically analyze models trained on a variety of different data sources. We show that state diversity is not always beneficial, and we demonstrate how action divergence and transition diversity interact in practice.

Domain Adaptation Through Task Distillation
Deep networks devour millions of precisely annotated images to build their complex and powerful representations. Unfortunately, tasks like autonomous driving have virtually no real-world training data. Repeatedly crashing a car into a tree is simply too expensive. The commonly prescribed solution is simple: learn a representation in simulation and transfer it to the real world. However, this transfer is challenging since simulated and real-world visual experiences vary dramatically. Our core observation is that for certain tasks, such as image recognition, datasets are plentiful. They exist in any interesting domain, simulated or real, and are easy to label and extend. We use these recognition datasets to link up a source and target domain to transfer models between them in a task distillation framework. Our method can successfully transfer navigation policies between drastically different simulators: ViZDoom, SuperTuxKart, and CARLA. Furthermore, it shows promising results on standard domain adaptation benchmarks.

Online Learning for Recommendations at Grubhub
We propose a method to easily modify existing offline Recommender Systems to run online using Transfer Learning. Online Learning for Recommender Systems has two main advantages: quality and scale. Like many Machine Learning algorithms in production if not regularly retrained will suffer from Concept Drift. A policy that is updated frequently online can adapt to drift faster than a batch system. This is especially true for user-interaction systems like recommenders where the underlying distribution can shift drastically to follow user behaviour. As a platform grows rapidly like Grubhub, the cost of running batch training jobs becomes material. A shift from stateless batch learning offline to stateful incremental learning online can recover, for example, at Grubhub, up to a 45x cost savings and a +20% metrics increase. There are a few challenges to overcome with the transition to online stateful learning, namely convergence, non-stationary embeddings and off-policy evaluation, which we explore from our experiences running this system in production.

Project and Probe: Sample-Efficient Domain Adaptation by Interpolating Orthogonal Features
Transfer learning with a small amount of target data is an effective and common approach to adapting a pre-trained model to distribution shifts. In some situations, target data labels may be expensive to obtain, so we may only have access to a limited number of target data points. To make the most of a very small target dataset, we propose a lightweight, sample-efficient approach that learns a diverse set of features and adapts to a target distribution by interpolating these features. Our approach, Project and Probe (Pro^2), first learns a linear projection that maps a pre-trained embedding onto orthogonal directions while being predictive of labels in the source dataset. The goal of this step is to learn a variety of predictive features, so that at least some of them remain useful after distribution shift. Pro^2 then learns a linear classifier on top of these projected features using a small target dataset. Theoretically, we find that Pro^2 results in more sample-efficient generalization by inducing a favorable bias-variance tradeoff. Our experiments on four datasets, with multiple distribution shift settings for each, show that Pro^2 improves performance by 5-15% when given limited target data compared to prior methods such as standard linear probing.

Towards a Unified View of Parameter-Efficient Transfer Learning
Fine-tuning large pre-trained language models on downstream tasks has become the de-facto learning paradigm in NLP. However, conventional approaches fine-tune all the parameters of the pre-trained model, which becomes prohibitive as the model size and the number of tasks grow. Recent work has proposed a variety of parameter-efficient transfer learning methods that only fine-tune a small number of (extra) parameters to attain strong performance. While effective, the critical ingredients for success and the connections among the various methods are poorly understood. In this paper, we break down the design of state-of-the-art parameter-efficient transfer learning methods and present a unified framework that establishes connections between them. Specifically, we re-frame them as modifications to specific hidden states in pre-trained models, and define a set of design dimensions along which different methods vary, such as the function to compute the modification and the position to apply the modification. Through comprehensive empirical studies across machine translation, text summarization, language understanding, and text classification benchmarks, we utilize the unified view to identify important design choices in previous methods. Furthermore, our unified framework enables the transfer of design elements across different approaches, and as a result we are able to instantiate new parameter-efficient fine-tuning methods that tune less parameters than previous methods while being more effective, achieving comparable results to fine-tuning all parameters on all four tasks.

Learning to Get Up Across Morphologies: Zero-Shot Recovery with a Unified Humanoid Policy
Fall recovery is a critical skill for humanoid robots in dynamic environments such as RoboCup, where prolonged downtime often decides the match. Recent techniques using deep reinforcement learning (DRL) have produced robust get-up behaviors, yet existing methods require training of separate policies for each robot morphology. This paper presents a single DRL policy capable of recovering from falls across seven humanoid robots with diverse heights (0.48 - 0.81 m), weights (2.8 - 7.9 kg), and dynamics. Trained with CrossQ, the unified policy transfers zero-shot up to 86 +/- 7% (95% CI [81, 89]) on unseen morphologies, eliminating the need for robot-specific training. Comprehensive leave-one-out experiments, morph scaling analysis, and diversity ablations show that targeted morphological coverage improves zero-shot generalization. In some cases, the shared policy even surpasses the specialist baselines. These findings illustrate the practicality of morphology-agnostic control for fall recovery, laying the foundation for generalist humanoid control. The software is open-source and available at: https://github.com/utra-robosoccer/unified-humanoid-getup
Diffusion-Based Neural Network Weights Generation
Transfer learning has gained significant attention in recent deep learning research due to its ability to accelerate convergence and enhance performance on new tasks. However, its success is often contingent on the similarity between source and target data, and training on numerous datasets can be costly, leading to blind selection of pretrained models with limited insight into their effectiveness. To address these challenges, we introduce D2NWG, a diffusion-based neural network weights generation technique that efficiently produces high-performing weights for transfer learning, conditioned on the target dataset. Our method extends generative hyper-representation learning to recast the latent diffusion paradigm for neural network weights generation, learning the weight distributions of models pretrained on various datasets. This allows for automatic generation of weights that generalize well across both seen and unseen tasks, outperforming state-of-the-art meta-learning methods and pretrained models. Moreover, our approach is scalable to large architectures such as large language models (LLMs), overcoming the limitations of current parameter generation techniques that rely on task-specific model collections or access to original training data. By modeling the parameter distribution of LLMs, D2NWG enables task-specific parameter generation without requiring additional fine-tuning or large collections of model variants. Extensive experiments show that our method consistently enhances the performance of diverse base models, regardless of their size or complexity, positioning it as a robust solution for scalable transfer learning.

Model Diffusion for Certifiable Few-shot Transfer Learning
In modern large-scale deep learning, a prevalent and effective workflow for solving low-data problems is adapting powerful pre-trained foundation models (FMs) to new tasks via parameter-efficient fine-tuning (PEFT). However, while empirically effective, the resulting solutions lack generalisation guarantees to certify their accuracy - which may be required for ethical or legal reasons prior to deployment in high-importance applications. In this paper we develop a novel transfer learning approach that is designed to facilitate non-vacuous learning theoretic generalisation guarantees for downstream tasks, even in the low-shot regime. Specifically, we first use upstream tasks to train a distribution over PEFT parameters. We then learn the downstream task by a sample-and-evaluate procedure -- sampling plausible PEFTs from the trained diffusion model and selecting the one with the highest likelihood on the downstream data. Crucially, this confines our model hypothesis to a finite set of PEFT samples. In contrast to learning in the typical continuous hypothesis spaces of neural network weights, this facilitates tighter risk certificates. We instantiate our bound and show non-trivial generalization guarantees compared to existing learning approaches which lead to vacuous bounds in the low-shot regime.
How Well Do Sparse Imagenet Models Transfer?
Transfer learning is a classic paradigm by which models pretrained on large "upstream" datasets are adapted to yield good results on "downstream" specialized datasets. Generally, more accurate models on the "upstream" dataset tend to provide better transfer accuracy "downstream". In this work, we perform an in-depth investigation of this phenomenon in the context of convolutional neural networks (CNNs) trained on the ImageNet dataset, which have been pruned - that is, compressed by sparsifying their connections. We consider transfer using unstructured pruned models obtained by applying several state-of-the-art pruning methods, including magnitude-based, second-order, re-growth, lottery-ticket, and regularization approaches, in the context of twelve standard transfer tasks. In a nutshell, our study shows that sparse models can match or even outperform the transfer performance of dense models, even at high sparsities, and, while doing so, can lead to significant inference and even training speedups. At the same time, we observe and analyze significant differences in the behaviour of different pruning methods.



Efficient Subgraph GNNs by Learning Effective Selection Policies
Subgraph GNNs are provably expressive neural architectures that learn graph representations from sets of subgraphs. Unfortunately, their applicability is hampered by the computational complexity associated with performing message passing on many subgraphs. In this paper, we consider the problem of learning to select a small subset of the large set of possible subgraphs in a data-driven fashion. We first motivate the problem by proving that there are families of WL-indistinguishable graphs for which there exist efficient subgraph selection policies: small subsets of subgraphs that can already identify all the graphs within the family. We then propose a new approach, called Policy-Learn, that learns how to select subgraphs in an iterative manner. We prove that, unlike popular random policies and prior work addressing the same problem, our architecture is able to learn the efficient policies mentioned above. Our experimental results demonstrate that Policy-Learn outperforms existing baselines across a wide range of datasets.


Manipulating Transfer Learning for Property Inference
Transfer learning is a popular method for tuning pretrained (upstream) models for different downstream tasks using limited data and computational resources. We study how an adversary with control over an upstream model used in transfer learning can conduct property inference attacks on a victim's tuned downstream model. For example, to infer the presence of images of a specific individual in the downstream training set. We demonstrate attacks in which an adversary can manipulate the upstream model to conduct highly effective and specific property inference attacks (AUC score > 0.9), without incurring significant performance loss on the main task. The main idea of the manipulation is to make the upstream model generate activations (intermediate features) with different distributions for samples with and without a target property, thus enabling the adversary to distinguish easily between downstream models trained with and without training examples that have the target property. Our code is available at https://github.com/yulongt23/Transfer-Inference.


Uncovering the Connections Between Adversarial Transferability and Knowledge Transferability
Knowledge transferability, or transfer learning, has been widely adopted to allow a pre-trained model in the source domain to be effectively adapted to downstream tasks in the target domain. It is thus important to explore and understand the factors affecting knowledge transferability. In this paper, as the first work, we analyze and demonstrate the connections between knowledge transferability and another important phenomenon--adversarial transferability, i.e., adversarial examples generated against one model can be transferred to attack other models. Our theoretical studies show that adversarial transferability indicates knowledge transferability and vice versa. Moreover, based on the theoretical insights, we propose two practical adversarial transferability metrics to characterize this process, serving as bidirectional indicators between adversarial and knowledge transferability. We conduct extensive experiments for different scenarios on diverse datasets, showing a positive correlation between adversarial transferability and knowledge transferability. Our findings will shed light on future research about effective knowledge transfer learning and adversarial transferability analyses.



One-Token Rollout: Guiding Supervised Fine-Tuning of LLMs with Policy Gradient
Supervised fine-tuning (SFT) is the predominant method for adapting large language models (LLMs), yet it often struggles with generalization compared to reinforcement learning (RL). In this work, we posit that this performance disparity stems not just from the loss function, but from a more fundamental difference: SFT learns from a fixed, pre-collected dataset, whereas RL utilizes on-policy data sampled from the current policy. Building on this hypothesis, we introduce one-token rollout (OTR), a novel fine-tuning algorithm that guides SFT with the policy gradient method. OTR reframes the autoregressive learning process by treating each token generation as a single-step reinforcement learning trajectory. At each step, it performs a Monte Carlo ``rollout'' by sampling multiple candidate tokens from the current policy's distribution. The ground-truth token from the supervised data is then used to provide a reward signal to these samples. Guided by policy gradient, our algorithm repurposes static, off-policy supervised data into a dynamic, on-policy signal at the token level, capturing the generalization benefits of on-policy learning while bypassing the costly overhead of full sentence generation. Through extensive experiments on a diverse suite of challenging benchmarks spanning mathematical reasoning, code generation, and general domain reasoning, we demonstrate that OTR consistently outperforms standard SFT. Our findings establish OTR as a powerful and practical alternative for fine-tuning LLMs and provide compelling evidence that the on-policy nature of data is a critical driver of generalization, offering a promising new direction for fine-tuning LLMs.


Actron3D: Learning Actionable Neural Functions from Videos for Transferable Robotic Manipulation
We present Actron3D, a framework that enables robots to acquire transferable 6-DoF manipulation skills from just a few monocular, uncalibrated, RGB-only human videos. At its core lies the Neural Affordance Function, a compact object-centric representation that distills actionable cues from diverse uncalibrated videos-geometry, visual appearance, and affordance-into a lightweight neural network, forming a memory bank of manipulation skills. During deployment, we adopt a pipeline that retrieves relevant affordance functions and transfers precise 6-DoF manipulation policies via coarse-to-fine optimization, enabled by continuous queries to the multimodal features encoded in the neural functions. Experiments in both simulation and the real world demonstrate that Actron3D significantly outperforms prior methods, achieving a 14.9 percentage point improvement in average success rate across 13 tasks while requiring only 2-3 demonstration videos per task.
Self-Supervised Prototypical Transfer Learning for Few-Shot Classification
Most approaches in few-shot learning rely on costly annotated data related to the goal task domain during (pre-)training. Recently, unsupervised meta-learning methods have exchanged the annotation requirement for a reduction in few-shot classification performance. Simultaneously, in settings with realistic domain shift, common transfer learning has been shown to outperform supervised meta-learning. Building on these insights and on advances in self-supervised learning, we propose a transfer learning approach which constructs a metric embedding that clusters unlabeled prototypical samples and their augmentations closely together. This pre-trained embedding is a starting point for few-shot classification by summarizing class clusters and fine-tuning. We demonstrate that our self-supervised prototypical transfer learning approach ProtoTransfer outperforms state-of-the-art unsupervised meta-learning methods on few-shot tasks from the mini-ImageNet dataset. In few-shot experiments with domain shift, our approach even has comparable performance to supervised methods, but requires orders of magnitude fewer labels.
Learning Long-Context Diffusion Policies via Past-Token Prediction
Reasoning over long sequences of observations and actions is essential for many robotic tasks. Yet, learning effective long-context policies from demonstrations remains challenging. As context length increases, training becomes increasingly expensive due to rising memory demands, and policy performance often degrades as a result of spurious correlations. Recent methods typically sidestep these issues by truncating context length, discarding historical information that may be critical for subsequent decisions. In this paper, we propose an alternative approach that explicitly regularizes the retention of past information. We first revisit the copycat problem in imitation learning and identify an opposite challenge in recent diffusion policies: rather than over-relying on prior actions, they often fail to capture essential dependencies between past and future actions. To address this, we introduce Past-Token Prediction (PTP), an auxiliary task in which the policy learns to predict past action tokens alongside future ones. This regularization significantly improves temporal modeling in the policy head, with minimal reliance on visual representations. Building on this observation, we further introduce a multistage training strategy: pre-train the visual encoder with short contexts, and fine-tune the policy head using cached long-context embeddings. This strategy preserves the benefits of PTP while greatly reducing memory and computational overhead. Finally, we extend PTP into a self-verification mechanism at test time, enabling the policy to score and select candidates consistent with past actions during inference. Experiments across four real-world and six simulated tasks demonstrate that our proposed method improves the performance of long-context diffusion policies by 3x and accelerates policy training by more than 10x.
ScaLearn: Simple and Highly Parameter-Efficient Task Transfer by Learning to Scale
Multi-task learning (MTL) has shown considerable practical benefits, particularly when using pre-trained language models (PLMs). While this is commonly achieved by simultaneously learning n tasks under a joint optimization procedure, recent methods such as AdapterFusion structure the problem into two distinct stages: (i) task learning, where knowledge specific to a task is encapsulated within sets of parameters (\eg adapters), and (ii) transfer, where this already learned knowledge is leveraged for a target task. This separation of concerns provides numerous benefits, such as promoting reusability, and addressing cases involving data privacy and societal concerns; on the flip side, current two-stage MTL methods come with the cost of introducing a substantial number of additional parameters. In this work, we address this issue by leveraging the usefulness of linearly scaling the output representations of source adapters for transfer learning. We introduce ScaLearn, a simple and highly parameter-efficient two-stage MTL method that capitalizes on the knowledge of the source tasks by learning a minimal set of scaling parameters that enable effective knowledge transfer to a target task. Our experiments on three benchmarks (GLUE, SuperGLUE, and HumSet) show that our ScaLearn, in addition to facilitating the benefits of two-stage MTL, consistently outperforms strong baselines with only a small number of transfer parameters - roughly 0.35% of those of AdapterFusion. Remarkably, we observe that ScaLearn maintains its strong abilities even when further reducing parameters through uniform scaling and layer-sharing, achieving similarly competitive results with only 8 transfer parameters for each target task. Our proposed approach thus demonstrates the power of simple scaling as a promise for more efficient task transfer.


Cross-Domain Policy Adaptation via Value-Guided Data Filtering
Generalizing policies across different domains with dynamics mismatch poses a significant challenge in reinforcement learning. For example, a robot learns the policy in a simulator, but when it is deployed in the real world, the dynamics of the environment may be different. Given the source and target domain with dynamics mismatch, we consider the online dynamics adaptation problem, in which case the agent can access sufficient source domain data while online interactions with the target domain are limited. Existing research has attempted to solve the problem from the dynamics discrepancy perspective. In this work, we reveal the limitations of these methods and explore the problem from the value difference perspective via a novel insight on the value consistency across domains. Specifically, we present the Value-Guided Data Filtering (VGDF) algorithm, which selectively shares transitions from the source domain based on the proximity of paired value targets across the two domains. Empirical results on various environments with kinematic and morphology shifts demonstrate that our method achieves superior performance compared to prior approaches.

TS-Align: A Teacher-Student Collaborative Framework for Scalable Iterative Finetuning of Large Language Models
Mainstream approaches to aligning large language models (LLMs) heavily rely on human preference data, particularly when models require periodic updates. The standard process for iterative alignment of LLMs involves collecting new human feedback for each update. However, the data collection process is costly and challenging to scale. To address this issue, we introduce the "TS-Align" framework, which fine-tunes a policy model using pairwise feedback data automatically mined from its outputs. This automatic mining process is efficiently accomplished through the collaboration between a large-scale teacher model and a small-scale student model. The policy fine-tuning process can be iteratively repeated using on-policy generations within our proposed teacher-student collaborative framework. Through extensive experiments, we demonstrate that our final aligned policy outperforms the base policy model with an average win rate of 69.7% across seven conversational or instruction-following datasets. Furthermore, we show that the ranking capability of the teacher is effectively distilled into the student through our pipeline, resulting in a small-scale yet effective reward model for policy model alignment.

Goal-Conditioned Imitation Learning using Score-based Diffusion Policies
We propose a new policy representation based on score-based diffusion models (SDMs). We apply our new policy representation in the domain of Goal-Conditioned Imitation Learning (GCIL) to learn general-purpose goal-specified policies from large uncurated datasets without rewards. Our new goal-conditioned policy architecture "BEhavior generation with ScOre-based Diffusion Policies" (BESO) leverages a generative, score-based diffusion model as its policy. BESO decouples the learning of the score model from the inference sampling process, and, hence allows for fast sampling strategies to generate goal-specified behavior in just 3 denoising steps, compared to 30+ steps of other diffusion based policies. Furthermore, BESO is highly expressive and can effectively capture multi-modality present in the solution space of the play data. Unlike previous methods such as Latent Plans or C-Bet, BESO does not rely on complex hierarchical policies or additional clustering for effective goal-conditioned behavior learning. Finally, we show how BESO can even be used to learn a goal-independent policy from play-data using classifier-free guidance. To the best of our knowledge this is the first work that a) represents a behavior policy based on such a decoupled SDM b) learns an SDM based policy in the domain of GCIL and c) provides a way to simultaneously learn a goal-dependent and a goal-independent policy from play-data. We evaluate BESO through detailed simulation and show that it consistently outperforms several state-of-the-art goal-conditioned imitation learning methods on challenging benchmarks. We additionally provide extensive ablation studies and experiments to demonstrate the effectiveness of our method for goal-conditioned behavior generation. Demonstrations and Code are available at https://intuitive-robots.github.io/beso-website/
Adversarial Skill Networks: Unsupervised Robot Skill Learning from Video
Key challenges for the deployment of reinforcement learning (RL) agents in the real world are the discovery, representation and reuse of skills in the absence of a reward function. To this end, we propose a novel approach to learn a task-agnostic skill embedding space from unlabeled multi-view videos. Our method learns a general skill embedding independently from the task context by using an adversarial loss. We combine a metric learning loss, which utilizes temporal video coherence to learn a state representation, with an entropy regularized adversarial skill-transfer loss. The metric learning loss learns a disentangled representation by attracting simultaneous viewpoints of the same observations and repelling visually similar frames from temporal neighbors. The adversarial skill-transfer loss enhances re-usability of learned skill embeddings over multiple task domains. We show that the learned embedding enables training of continuous control policies to solve novel tasks that require the interpolation of previously seen skills. Our extensive evaluation with both simulation and real world data demonstrates the effectiveness of our method in learning transferable skills from unlabeled interaction videos and composing them for new tasks. Code, pretrained models and dataset are available at http://robotskills.cs.uni-freiburg.de
RePO: Bridging On-Policy Learning and Off-Policy Knowledge through Rephrasing Policy Optimization
Aligning large language models (LLMs) on domain-specific data remains a fundamental challenge. Supervised fine-tuning (SFT) offers a straightforward way to inject domain knowledge but often degrades the model's generality. In contrast, on-policy reinforcement learning (RL) preserves generality but fails to effectively assimilate hard samples that exceed the model's current reasoning level. Recent off-policy RL attempts improve hard sample utilization, yet they suffer from severe training instability due to the forced distribution shift toward off-policy knowledge. To reconcile effective off-policy knowledge absorption with the stability of on-policy RL, we propose Rephrasing Policy Optimization (RePO). In RePO, the policy model is prompted to first comprehend off-policy knowledge and then rephrase it into trajectories that conform to its own stylistic and parametric distribution. RePO dynamically replaces low-reward rollouts with these rephrased, high-quality trajectories. This strategy guides the model toward correct reasoning paths while strictly preserving on-policy training dynamics. Experiments on several benchmarks demonstrate that RePO improves hard-sample utilization and outperforms existing baselines, achieving state-of-the-art performance.
Noise May Contain Transferable Knowledge: Understanding Semi-supervised Heterogeneous Domain Adaptation from an Empirical Perspective
Semi-supervised heterogeneous domain adaptation (SHDA) addresses learning across domains with distinct feature representations and distributions, where source samples are labeled while most target samples are unlabeled, with only a small fraction labeled. Moreover, there is no one-to-one correspondence between source and target samples. Although various SHDA methods have been developed to tackle this problem, the nature of the knowledge transferred across heterogeneous domains remains unclear. This paper delves into this question from an empirical perspective. We conduct extensive experiments on about 330 SHDA tasks, employing two supervised learning methods and seven representative SHDA methods. Surprisingly, our observations indicate that both the category and feature information of source samples do not significantly impact the performance of the target domain. Additionally, noise drawn from simple distributions, when used as source samples, may contain transferable knowledge. Based on this insight, we perform a series of experiments to uncover the underlying principles of transferable knowledge in SHDA. Specifically, we design a unified Knowledge Transfer Framework (KTF) for SHDA. Based on the KTF, we find that the transferable knowledge in SHDA primarily stems from the transferability and discriminability of the source domain. Consequently, ensuring those properties in source samples, regardless of their origin (e.g., image, text, noise), can enhance the effectiveness of knowledge transfer in SHDA tasks. The codes and datasets are available at https://github.com/yyyaoyuan/SHDA.


CLASS: Contrastive Learning via Action Sequence Supervision for Robot Manipulation
Recent advances in Behavior Cloning (BC) have led to strong performance in robotic manipulation, driven by expressive models, sequence modeling of actions, and large-scale demonstration data. However, BC faces significant challenges when applied to heterogeneous datasets, such as visual shift with different camera poses or object appearances, where performance degrades despite the benefits of learning at scale. This stems from BC's tendency to overfit individual demonstrations rather than capture shared structure, limiting generalization. To address this, we introduce Contrastive Learning via Action Sequence Supervision (CLASS), a method for learning behavioral representations from demonstrations using supervised contrastive learning. CLASS leverages weak supervision from similar action sequences identified via Dynamic Time Warping (DTW) and optimizes a soft InfoNCE loss with similarity-weighted positive pairs. We evaluate CLASS on 5 simulation benchmarks and 3 real-world tasks to achieve competitive results using retrieval-based control with representations only. Most notably, for downstream policy learning under significant visual shifts, Diffusion Policy with CLASS pre-training achieves an average success rate of 75%, while all other baseline methods fail to perform competitively. Project webpage: https://class-robot.github.io.

Balancing Discriminability and Transferability for Source-Free Domain Adaptation
Conventional domain adaptation (DA) techniques aim to improve domain transferability by learning domain-invariant representations; while concurrently preserving the task-discriminability knowledge gathered from the labeled source data. However, the requirement of simultaneous access to labeled source and unlabeled target renders them unsuitable for the challenging source-free DA setting. The trivial solution of realizing an effective original to generic domain mapping improves transferability but degrades task discriminability. Upon analyzing the hurdles from both theoretical and empirical standpoints, we derive novel insights to show that a mixup between original and corresponding translated generic samples enhances the discriminability-transferability trade-off while duly respecting the privacy-oriented source-free setting. A simple but effective realization of the proposed insights on top of the existing source-free DA approaches yields state-of-the-art performance with faster convergence. Beyond single-source, we also outperform multi-source prior-arts across both classification and semantic segmentation benchmarks.
Hierarchical Programmatic Reinforcement Learning via Learning to Compose Programs
Aiming to produce reinforcement learning (RL) policies that are human-interpretable and can generalize better to novel scenarios, Trivedi et al. (2021) present a method (LEAPS) that first learns a program embedding space to continuously parameterize diverse programs from a pre-generated program dataset, and then searches for a task-solving program in the learned program embedding space when given a task. Despite the encouraging results, the program policies that LEAPS can produce are limited by the distribution of the program dataset. Furthermore, during searching, LEAPS evaluates each candidate program solely based on its return, failing to precisely reward correct parts of programs and penalize incorrect parts. To address these issues, we propose to learn a meta-policy that composes a series of programs sampled from the learned program embedding space. By learning to compose programs, our proposed hierarchical programmatic reinforcement learning (HPRL) framework can produce program policies that describe out-of-distributionally complex behaviors and directly assign credits to programs that induce desired behaviors. The experimental results in the Karel domain show that our proposed framework outperforms baselines. The ablation studies confirm the limitations of LEAPS and justify our design choices.

Live in the Moment: Learning Dynamics Model Adapted to Evolving Policy
Model-based reinforcement learning (RL) often achieves higher sample efficiency in practice than model-free RL by learning a dynamics model to generate samples for policy learning. Previous works learn a dynamics model that fits under the empirical state-action visitation distribution for all historical policies, i.e., the sample replay buffer. However, in this paper, we observe that fitting the dynamics model under the distribution for all historical policies does not necessarily benefit model prediction for the current policy since the policy in use is constantly evolving over time. The evolving policy during training will cause state-action visitation distribution shifts. We theoretically analyze how this distribution shift over historical policies affects the model learning and model rollouts. We then propose a novel dynamics model learning method, named Policy-adapted Dynamics Model Learning (PDML). PDML dynamically adjusts the historical policy mixture distribution to ensure the learned model can continually adapt to the state-action visitation distribution of the evolving policy. Experiments on a range of continuous control environments in MuJoCo show that PDML achieves significant improvement in sample efficiency and higher asymptotic performance combined with the state-of-the-art model-based RL methods.



SMART: Robust and Efficient Fine-Tuning for Pre-trained Natural Language Models through Principled Regularized Optimization
Transfer learning has fundamentally changed the landscape of natural language processing (NLP) research. Many existing state-of-the-art models are first pre-trained on a large text corpus and then fine-tuned on downstream tasks. However, due to limited data resources from downstream tasks and the extremely large capacity of pre-trained models, aggressive fine-tuning often causes the adapted model to overfit the data of downstream tasks and forget the knowledge of the pre-trained model. To address the above issue in a more principled manner, we propose a new computational framework for robust and efficient fine-tuning for pre-trained language models. Specifically, our proposed framework contains two important ingredients: 1. Smoothness-inducing regularization, which effectively manages the capacity of the model; 2. Bregman proximal point optimization, which is a class of trust-region methods and can prevent knowledge forgetting. Our experiments demonstrate that our proposed method achieves the state-of-the-art performance on multiple NLP benchmarks.


Less is More: Parameter-Efficient Selection of Intermediate Tasks for Transfer Learning
Intermediate task transfer learning can greatly improve model performance. If, for example, one has little training data for emotion detection, first fine-tuning a language model on a sentiment classification dataset may improve performance strongly. But which task to choose for transfer learning? Prior methods producing useful task rankings are infeasible for large source pools, as they require forward passes through all source language models. We overcome this by introducing Embedding Space Maps (ESMs), light-weight neural networks that approximate the effect of fine-tuning a language model. We conduct the largest study on NLP task transferability and task selection with 12k source-target pairs. We find that applying ESMs on a prior method reduces execution time and disk space usage by factors of 10 and 278, respectively, while retaining high selection performance (avg. regret@5 score of 2.95).

Language Model is All You Need: Natural Language Understanding as Question Answering
Different flavors of transfer learning have shown tremendous impact in advancing research and applications of machine learning. In this work we study the use of a specific family of transfer learning, where the target domain is mapped to the source domain. Specifically we map Natural Language Understanding (NLU) problems to QuestionAnswering (QA) problems and we show that in low data regimes this approach offers significant improvements compared to other approaches to NLU. Moreover we show that these gains could be increased through sequential transfer learning across NLU problems from different domains. We show that our approach could reduce the amount of required data for the same performance by up to a factor of 10.

Maximum Causal Entropy Inverse Constrained Reinforcement Learning
When deploying artificial agents in real-world environments where they interact with humans, it is crucial that their behavior is aligned with the values, social norms or other requirements of that environment. However, many environments have implicit constraints that are difficult to specify and transfer to a learning agent. To address this challenge, we propose a novel method that utilizes the principle of maximum causal entropy to learn constraints and an optimal policy that adheres to these constraints, using demonstrations of agents that abide by the constraints. We prove convergence in a tabular setting and provide an approximation which scales to complex environments. We evaluate the effectiveness of the learned policy by assessing the reward received and the number of constraint violations, and we evaluate the learned cost function based on its transferability to other agents. Our method has been shown to outperform state-of-the-art approaches across a variety of tasks and environments, and it is able to handle problems with stochastic dynamics and a continuous state-action space.

Efficient Multi-Source Knowledge Transfer by Model Merging
While transfer learning is an advantageous strategy, it overlooks the opportunity to leverage knowledge from numerous available models online. Addressing this multi-source transfer learning problem is a promising path to boost adaptability and cut re-training costs. However, existing approaches are inherently coarse-grained, lacking the necessary precision for granular knowledge extraction and the aggregation efficiency required to fuse knowledge from either a large number of source models or those with high parameter counts. We address these limitations by leveraging Singular Value Decomposition (SVD) to first decompose each source model into its elementary, rank-one components. A subsequent aggregation stage then selects only the most salient components from all sources, thereby overcoming the previous efficiency and precision limitations. To best preserve and leverage the synthesized knowledge base, our method adapts to the target task by fine-tuning only the principal singular values of the merged matrix. In essence, this process only recalibrates the importance of top SVD components. The proposed framework allows for efficient transfer learning, is robust to perturbations both at the input level and in the parameter space (e.g., noisy or pruned sources), and scales well computationally.
Policy-Guided Diffusion
In many real-world settings, agents must learn from an offline dataset gathered by some prior behavior policy. Such a setting naturally leads to distribution shift between the behavior policy and the target policy being trained - requiring policy conservatism to avoid instability and overestimation bias. Autoregressive world models offer a different solution to this by generating synthetic, on-policy experience. However, in practice, model rollouts must be severely truncated to avoid compounding error. As an alternative, we propose policy-guided diffusion. Our method uses diffusion models to generate entire trajectories under the behavior distribution, applying guidance from the target policy to move synthetic experience further on-policy. We show that policy-guided diffusion models a regularized form of the target distribution that balances action likelihood under both the target and behavior policies, leading to plausible trajectories with high target policy probability, while retaining a lower dynamics error than an offline world model baseline. Using synthetic experience from policy-guided diffusion as a drop-in substitute for real data, we demonstrate significant improvements in performance across a range of standard offline reinforcement learning algorithms and environments. Our approach provides an effective alternative to autoregressive offline world models, opening the door to the controllable generation of synthetic training data.


On-Policy Model Errors in Reinforcement Learning
Model-free reinforcement learning algorithms can compute policy gradients given sampled environment transitions, but require large amounts of data. In contrast, model-based methods can use the learned model to generate new data, but model errors and bias can render learning unstable or suboptimal. In this paper, we present a novel method that combines real-world data and a learned model in order to get the best of both worlds. The core idea is to exploit the real-world data for on-policy predictions and use the learned model only to generalize to different actions. Specifically, we use the data as time-dependent on-policy correction terms on top of a learned model, to retain the ability to generate data without accumulating errors over long prediction horizons. We motivate this method theoretically and show that it counteracts an error term for model-based policy improvement. Experiments on MuJoCo- and PyBullet-benchmarks show that our method can drastically improve existing model-based approaches without introducing additional tuning parameters.
Exploring Model Transferability through the Lens of Potential Energy
Transfer learning has become crucial in computer vision tasks due to the vast availability of pre-trained deep learning models. However, selecting the optimal pre-trained model from a diverse pool for a specific downstream task remains a challenge. Existing methods for measuring the transferability of pre-trained models rely on statistical correlations between encoded static features and task labels, but they overlook the impact of underlying representation dynamics during fine-tuning, leading to unreliable results, especially for self-supervised models. In this paper, we present an insightful physics-inspired approach named PED to address these challenges. We reframe the challenge of model selection through the lens of potential energy and directly model the interaction forces that influence fine-tuning dynamics. By capturing the motion of dynamic representations to decline the potential energy within a force-driven physical model, we can acquire an enhanced and more stable observation for estimating transferability. The experimental results on 10 downstream tasks and 12 self-supervised models demonstrate that our approach can seamlessly integrate into existing ranking techniques and enhance their performances, revealing its effectiveness for the model selection task and its potential for understanding the mechanism in transfer learning. Code will be available at https://github.com/lixiaotong97/PED.
Aligning Large Language Models by On-Policy Self-Judgment
Existing approaches for aligning large language models with human preferences face a trade-off that requires a separate reward model (RM) for on-policy learning. In this paper, we present a novel alignment framework, that (1) does on-policy learning and 2) is parameter efficient, as it does not require an additional RM for evaluating the samples for on-policy learning. To this end, we propose Judge-augmented Supervised Fine-Tuning (JSFT) to train a single model to act as both a policy and a judge. Specifically, we view the pairwise judgment task, choosing the better response from a response pair, as a special case of the instruction-following task. The resulting model can judge preferences of on-the-fly responses from current policy initialized from itself. Experimental results show the efficacy of , outperforming baselines in preference benchmarks. We also show that the rejecting sampling by itself can improve performance further without an additional evaluator.


Steering Your Diffusion Policy with Latent Space Reinforcement Learning
Robotic control policies learned from human demonstrations have achieved impressive results in many real-world applications. However, in scenarios where initial performance is not satisfactory, as is often the case in novel open-world settings, such behavioral cloning (BC)-learned policies typically require collecting additional human demonstrations to further improve their behavior -- an expensive and time-consuming process. In contrast, reinforcement learning (RL) holds the promise of enabling autonomous online policy improvement, but often falls short of achieving this due to the large number of samples it typically requires. In this work we take steps towards enabling fast autonomous adaptation of BC-trained policies via efficient real-world RL. Focusing in particular on diffusion policies -- a state-of-the-art BC methodology -- we propose diffusion steering via reinforcement learning (DSRL): adapting the BC policy by running RL over its latent-noise space. We show that DSRL is highly sample efficient, requires only black-box access to the BC policy, and enables effective real-world autonomous policy improvement. Furthermore, DSRL avoids many of the challenges associated with finetuning diffusion policies, obviating the need to modify the weights of the base policy at all. We demonstrate DSRL on simulated benchmarks, real-world robotic tasks, and for adapting pretrained generalist policies, illustrating its sample efficiency and effective performance at real-world policy improvement.
Guiding Data Collection via Factored Scaling Curves
Generalist imitation learning policies trained on large datasets show great promise for solving diverse manipulation tasks. However, to ensure generalization to different conditions, policies need to be trained with data collected across a large set of environmental factor variations (e.g., camera pose, table height, distractors) - a prohibitively expensive undertaking, if done exhaustively. We introduce a principled method for deciding what data to collect and how much to collect for each factor by constructing factored scaling curves (FSC), which quantify how policy performance varies as data scales along individual or paired factors. These curves enable targeted data acquisition for the most influential factor combinations within a given budget. We evaluate the proposed method through extensive simulated and real-world experiments, across both training-from-scratch and fine-tuning settings, and show that it boosts success rates in real-world tasks in new environments by up to 26% over existing data-collection strategies. We further demonstrate how factored scaling curves can effectively guide data collection using an offline metric, without requiring real-world evaluation at scale.
Aligning Diffusion Behaviors with Q-functions for Efficient Continuous Control
Drawing upon recent advances in language model alignment, we formulate offline Reinforcement Learning as a two-stage optimization problem: First pretraining expressive generative policies on reward-free behavior datasets, then fine-tuning these policies to align with task-specific annotations like Q-values. This strategy allows us to leverage abundant and diverse behavior data to enhance generalization and enable rapid adaptation to downstream tasks using minimal annotations. In particular, we introduce Efficient Diffusion Alignment (EDA) for solving continuous control problems. EDA utilizes diffusion models for behavior modeling. However, unlike previous approaches, we represent diffusion policies as the derivative of a scalar neural network with respect to action inputs. This representation is critical because it enables direct density calculation for diffusion models, making them compatible with existing LLM alignment theories. During policy fine-tuning, we extend preference-based alignment methods like Direct Preference Optimization (DPO) to align diffusion behaviors with continuous Q-functions. Our evaluation on the D4RL benchmark shows that EDA exceeds all baseline methods in overall performance. Notably, EDA maintains about 95\% of performance and still outperforms several baselines given only 1\% of Q-labelled data during fine-tuning.


Knowledge is Not Enough: Injecting RL Skills for Continual Adaptation
Large Language Models (LLMs) face the "knowledge cutoff" challenge, where their frozen parametric memory prevents direct internalization of new information. While Supervised Fine-Tuning (SFT) is commonly used to update model knowledge, it often updates factual content without reliably improving the model's ability to use the newly incorporated information for question answering or decision-making. Reinforcement Learning (RL) is essential for acquiring reasoning skills; however, its high computational cost makes it impractical for efficient online adaptation. We empirically observe that the parameter updates induced by SFT and RL are nearly orthogonal. Based on this observation, we propose Parametric Skill Transfer (PaST), a framework that supports modular skill transfer for efficient and effective knowledge adaptation. By extracting a domain-agnostic Skill Vector from a source domain, we can linearly inject knowledge manipulation skills into a target model after it has undergone lightweight SFT on new data. Experiments on knowledge-incorporation QA (SQuAD, LooGLE) and agentic tool-use benchmarks (ToolBench) demonstrate the effectiveness of our method. On SQuAD, PaST outperforms the state-of-the-art self-editing SFT baseline by up to 9.9 points. PaST further scales to long-context QA on LooGLE with an 8.0-point absolute accuracy gain, and improves zero-shot ToolBench success rates by +10.3 points on average with consistent gains across tool categories, indicating strong scalability and cross-domain transferability of the Skill Vector.

Disposable Transfer Learning for Selective Source Task Unlearning
Transfer learning is widely used for training deep neural networks (DNN) for building a powerful representation. Even after the pre-trained model is adapted for the target task, the representation performance of the feature extractor is retained to some extent. As the performance of the pre-trained model can be considered the private property of the owner, it is natural to seek the exclusive right of the generalized performance of the pre-trained weight. To address this issue, we suggest a new paradigm of transfer learning called disposable transfer learning (DTL), which disposes of only the source task without degrading the performance of the target task. To achieve knowledge disposal, we propose a novel loss named Gradient Collision loss (GC loss). GC loss selectively unlearns the source knowledge by leading the gradient vectors of mini-batches in different directions. Whether the model successfully unlearns the source task is measured by piggyback learning accuracy (PL accuracy). PL accuracy estimates the vulnerability of knowledge leakage by retraining the scrubbed model on a subset of source data or new downstream data. We demonstrate that GC loss is an effective approach to the DTL problem by showing that the model trained with GC loss retains the performance on the target task with a significantly reduced PL accuracy.
Boosting Tool Use of Large Language Models via Iterative Reinforced Fine-Tuning
Augmenting large language models (LLMs) with external tools is a promising approach to enhance their capabilities. Effectively leveraging this potential for complex tasks hinges crucially on improving their ability to use tools. Synthesizing tool use data by simulating the real world is an effective approach. Nevertheless, our investigation reveals that training gains significantly decay as the scale of these data increases. The primary factor is the model's poor performance (a.k.a deficiency) in complex scenarios, which hinders learning from data using SFT. Driven by this objective, we propose an iterative reinforced fine-tuning strategy to continually guide the model to alleviate it. Specifically, we first identify deficiency-related data based on feedback from the policy model, then perform a Monte Carlo Tree Search to collect fine-grained preference pairs to pinpoint deficiencies. Subsequently, we update the policy model using preference optimization to align with ground truth and misalign with deficiencies. This process can be iterated. Moreover, before the iteration, we propose an easy-to-hard warm-up SFT strategy to facilitate learning from challenging data. The experiments demonstrate our models go beyond the same parametric models, outperforming many larger open-source and closed-source models. Additionally, it has achieved notable training gains in complex tool use scenarios.

ViDA: Homeostatic Visual Domain Adapter for Continual Test Time Adaptation
Since real-world machine systems are running in non-stationary environments, Continual Test-Time Adaptation (CTTA) task is proposed to adapt the pre-trained model to continually changing target domains. Recently, existing methods mainly focus on model-based adaptation, which aims to leverage a self-training manner to extract the target domain knowledge. However, pseudo labels can be noisy and the updated model parameters are unreliable under dynamic data distributions, leading to error accumulation and catastrophic forgetting in the continual adaptation process. To tackle these challenges and maintain the model plasticity, we design a Visual Domain Adapter (ViDA) for CTTA, explicitly handling both domain-specific and domain-shared knowledge. Specifically, we first comprehensively explore the different domain representations of the adapters with trainable high-rank or low-rank embedding spaces. Then we inject ViDAs into the pre-trained model, which leverages high-rank and low-rank features to adapt the current domain distribution and maintain the continual domain-shared knowledge, respectively. To exploit the low-rank and high-rank ViDAs more effectively, we further propose a Homeostatic Knowledge Allotment (HKA) strategy, which adaptively combines different knowledge from each ViDA. Extensive experiments conducted on four widely used benchmarks demonstrate that our proposed method achieves state-of-the-art performance in both classification and segmentation CTTA tasks. Note that, our method can be regarded as a novel transfer paradigm for large-scale models, delivering promising results in adaptation to continually changing distributions. Project page: https://sites.google.com/view/iclr2024-vida/home.


PEARL: Zero-shot Cross-task Preference Alignment and Robust Reward Learning for Robotic Manipulation
In preference-based Reinforcement Learning (RL), obtaining a large number of preference labels are both time-consuming and costly. Furthermore, the queried human preferences cannot be utilized for the new tasks. In this paper, we propose Zero-shot Cross-task Preference Alignment and Robust Reward Learning (PEARL), which learns policies from cross-task preference transfer without any human labels of the target task. Our contributions include two novel components that facilitate the transfer and learning process. The first is Cross-task Preference Alignment (CPA), which transfers the preferences between tasks via optimal transport. The key idea of CPA is to use Gromov-Wasserstein distance to align the trajectories between tasks, and the solved optimal transport matrix serves as the correspondence between trajectories. The target task preferences are computed as the weighted sum of source task preference labels with the correspondence as weights. Moreover, to ensure robust learning from these transferred labels, we introduce Robust Reward Learning (RRL), which considers both reward mean and uncertainty by modeling rewards as Gaussian distributions. Empirical results on robotic manipulation tasks from Meta-World and Robomimic demonstrate that our method is capable of transferring preference labels across tasks accurately and then learns well-behaved policies. Notably, our approach significantly exceeds existing methods when there are few human preferences. The code and videos of our method are available at: https://sites.google.com/view/pearl-preference.

PoCo: Policy Composition from and for Heterogeneous Robot Learning
Training general robotic policies from heterogeneous data for different tasks is a significant challenge. Existing robotic datasets vary in different modalities such as color, depth, tactile, and proprioceptive information, and collected in different domains such as simulation, real robots, and human videos. Current methods usually collect and pool all data from one domain to train a single policy to handle such heterogeneity in tasks and domains, which is prohibitively expensive and difficult. In this work, we present a flexible approach, dubbed Policy Composition, to combine information across such diverse modalities and domains for learning scene-level and task-level generalized manipulation skills, by composing different data distributions represented with diffusion models. Our method can use task-level composition for multi-task manipulation and be composed with analytic cost functions to adapt policy behaviors at inference time. We train our method on simulation, human, and real robot data and evaluate in tool-use tasks. The composed policy achieves robust and dexterous performance under varying scenes and tasks and outperforms baselines from a single data source in both simulation and real-world experiments. See https://liruiw.github.io/policycomp for more details .

Overwriting Pretrained Bias with Finetuning Data
Transfer learning is beneficial by allowing the expressive features of models pretrained on large-scale datasets to be finetuned for the target task of smaller, more domain-specific datasets. However, there is a concern that these pretrained models may come with their own biases which would propagate into the finetuned model. In this work, we investigate bias when conceptualized as both spurious correlations between the target task and a sensitive attribute as well as underrepresentation of a particular group in the dataset. Under both notions of bias, we find that (1) models finetuned on top of pretrained models can indeed inherit their biases, but (2) this bias can be corrected for through relatively minor interventions to the finetuning dataset, and often with a negligible impact to performance. Our findings imply that careful curation of the finetuning dataset is important for reducing biases on a downstream task, and doing so can even compensate for bias in the pretrained model.
Unsupervised Cross-Domain Image Generation
We study the problem of transferring a sample in one domain to an analog sample in another domain. Given two related domains, S and T, we would like to learn a generative function G that maps an input sample from S to the domain T, such that the output of a given function f, which accepts inputs in either domains, would remain unchanged. Other than the function f, the training data is unsupervised and consist of a set of samples from each domain. The Domain Transfer Network (DTN) we present employs a compound loss function that includes a multiclass GAN loss, an f-constancy component, and a regularizing component that encourages G to map samples from T to themselves. We apply our method to visual domains including digits and face images and demonstrate its ability to generate convincing novel images of previously unseen entities, while preserving their identity.
Fantastic Gains and Where to Find Them: On the Existence and Prospect of General Knowledge Transfer between Any Pretrained Model
Training deep networks requires various design decisions regarding for instance their architecture, data augmentation, or optimization. In this work, we find these training variations to result in networks learning unique feature sets from the data. Using public model libraries comprising thousands of models trained on canonical datasets like ImageNet, we observe that for arbitrary pairings of pretrained models, one model extracts significant data context unavailable in the other -- independent of overall performance. Given any arbitrary pairing of pretrained models and no external rankings (such as separate test sets, e.g. due to data privacy), we investigate if it is possible to transfer such "complementary" knowledge from one model to another without performance degradation -- a task made particularly difficult as additional knowledge can be contained in stronger, equiperformant or weaker models. Yet facilitating robust transfer in scenarios agnostic to pretrained model pairings would unlock auxiliary gains and knowledge fusion from any model repository without restrictions on model and problem specifics - including from weaker, lower-performance models. This work therefore provides an initial, in-depth exploration on the viability of such general-purpose knowledge transfer. Across large-scale experiments, we first reveal the shortcomings of standard knowledge distillation techniques, and then propose a much more general extension through data partitioning for successful transfer between nearly all pretrained models, which we show can also be done unsupervised. Finally, we assess both the scalability and impact of fundamental model properties on successful model-agnostic knowledge transfer.
TabRepo: A Large Scale Repository of Tabular Model Evaluations and its AutoML Applications
We introduce TabRepo, a new dataset of tabular model evaluations and predictions. TabRepo contains the predictions and metrics of 1310 models evaluated on 200 classification and regression datasets. We illustrate the benefit of our dataset in multiple ways. First, we show that it allows to perform analysis such as comparing Hyperparameter Optimization against current AutoML systems while also considering ensembling at marginal cost by using precomputed model predictions. Second, we show that our dataset can be readily leveraged to perform transfer-learning. In particular, we show that applying standard transfer-learning techniques allows to outperform current state-of-the-art tabular systems in accuracy, runtime and latency.

TransferTransfo: A Transfer Learning Approach for Neural Network Based Conversational Agents
We introduce a new approach to generative data-driven dialogue systems (e.g. chatbots) called TransferTransfo which is a combination of a Transfer learning based training scheme and a high-capacity Transformer model. Fine-tuning is performed by using a multi-task objective which combines several unsupervised prediction tasks. The resulting fine-tuned model shows strong improvements over the current state-of-the-art end-to-end conversational models like memory augmented seq2seq and information-retrieval models. On the privately held PERSONA-CHAT dataset of the Conversational Intelligence Challenge 2, this approach obtains a new state-of-the-art, with respective perplexity, Hits@1 and F1 metrics of 16.28 (45 % absolute improvement), 80.7 (46 % absolute improvement) and 19.5 (20 % absolute improvement).




Tight Rates in Supervised Outlier Transfer Learning
A critical barrier to learning an accurate decision rule for outlier detection is the scarcity of outlier data. As such, practitioners often turn to the use of similar but imperfect outlier data from which they might transfer information to the target outlier detection task. Despite the recent empirical success of transfer learning approaches in outlier detection, a fundamental understanding of when and how knowledge can be transferred from a source to a target outlier detection task remains elusive. In this work, we adopt the traditional framework of Neyman-Pearson classification -- which formalizes supervised outlier detection -- with the added assumption that one has access to some related but imperfect outlier data. Our main results are as follows: We first determine the information-theoretic limits of the problem under a measure of discrepancy that extends some existing notions from traditional balanced classification; interestingly, unlike in balanced classification, seemingly very dissimilar sources can provide much information about a target, thus resulting in fast transfer. We then show that, in principle, these information-theoretic limits are achievable by adaptive procedures, i.e., procedures with no a priori information on the discrepancy between source and target outlier distributions.
Meta-DMoE: Adapting to Domain Shift by Meta-Distillation from Mixture-of-Experts
In this paper, we tackle the problem of domain shift. Most existing methods perform training on multiple source domains using a single model, and the same trained model is used on all unseen target domains. Such solutions are sub-optimal as each target domain exhibits its own specialty, which is not adapted. Furthermore, expecting single-model training to learn extensive knowledge from multiple source domains is counterintuitive. The model is more biased toward learning only domain-invariant features and may result in negative knowledge transfer. In this work, we propose a novel framework for unsupervised test-time adaptation, which is formulated as a knowledge distillation process to address domain shift. Specifically, we incorporate Mixture-of-Experts (MoE) as teachers, where each expert is separately trained on different source domains to maximize their specialty. Given a test-time target domain, a small set of unlabeled data is sampled to query the knowledge from MoE. As the source domains are correlated to the target domains, a transformer-based aggregator then combines the domain knowledge by examining the interconnection among them. The output is treated as a supervision signal to adapt a student prediction network toward the target domain. We further employ meta-learning to enforce the aggregator to distill positive knowledge and the student network to achieve fast adaptation. Extensive experiments demonstrate that the proposed method outperforms the state-of-the-art and validates the effectiveness of each proposed component. Our code is available at https://github.com/n3il666/Meta-DMoE.
Enhancing Transfer Learning with Flexible Nonparametric Posterior Sampling
Transfer learning has recently shown significant performance across various tasks involving deep neural networks. In these transfer learning scenarios, the prior distribution for downstream data becomes crucial in Bayesian model averaging (BMA). While previous works proposed the prior over the neural network parameters centered around the pre-trained solution, such strategies have limitations when dealing with distribution shifts between upstream and downstream data. This paper introduces nonparametric transfer learning (NPTL), a flexible posterior sampling method to address the distribution shift issue within the context of nonparametric learning. The nonparametric learning (NPL) method is a recent approach that employs a nonparametric prior for posterior sampling, efficiently accounting for model misspecification scenarios, which is suitable for transfer learning scenarios that may involve the distribution shift between upstream and downstream tasks. Through extensive empirical validations, we demonstrate that our approach surpasses other baselines in BMA performance.
Scaling Proprioceptive-Visual Learning with Heterogeneous Pre-trained Transformers
One of the roadblocks for training generalist robotic models today is heterogeneity. Previous robot learning methods often collect data to train with one specific embodiment for one task, which is expensive and prone to overfitting. This work studies the problem of learning policy representations through heterogeneous pre-training on robot data across different embodiments and tasks at scale. We propose Heterogeneous Pre-trained Transformers (HPT), which pre-train a large, shareable trunk of a policy neural network to learn a task and embodiment agnostic shared representation. This general architecture aligns the specific proprioception and vision inputs from distinct embodiments to a short sequence of tokens and then processes such tokens to map to control robots for different tasks. Leveraging the recent large-scale multi-embodiment real-world robotic datasets as well as simulation, deployed robots, and human video datasets, we investigate pre-training policies across heterogeneity. We conduct experiments to investigate the scaling behaviors of training objectives, to the extent of 52 datasets. HPTs outperform several baselines and enhance the fine-tuned policy performance by over 20% on unseen tasks in multiple simulator benchmarks and real-world settings. See the project website (https://liruiw.github.io/hpt/) for code and videos.

LanDA: Language-Guided Multi-Source Domain Adaptation
Multi-Source Domain Adaptation (MSDA) aims to mitigate changes in data distribution when transferring knowledge from multiple labeled source domains to an unlabeled target domain. However, existing MSDA techniques assume target domain images are available, yet overlook image-rich semantic information. Consequently, an open question is whether MSDA can be guided solely by textual cues in the absence of target domain images. By employing a multimodal model with a joint image and language embedding space, we propose a novel language-guided MSDA approach, termed LanDA, based on optimal transfer theory, which facilitates the transfer of multiple source domains to a new target domain, requiring only a textual description of the target domain without needing even a single target domain image, while retaining task-relevant information. We present extensive experiments across different transfer scenarios using a suite of relevant benchmarks, demonstrating that LanDA outperforms standard fine-tuning and ensemble approaches in both target and source domains.

Universal Sentence Encoder
We present models for encoding sentences into embedding vectors that specifically target transfer learning to other NLP tasks. The models are efficient and result in accurate performance on diverse transfer tasks. Two variants of the encoding models allow for trade-offs between accuracy and compute resources. For both variants, we investigate and report the relationship between model complexity, resource consumption, the availability of transfer task training data, and task performance. Comparisons are made with baselines that use word level transfer learning via pretrained word embeddings as well as baselines do not use any transfer learning. We find that transfer learning using sentence embeddings tends to outperform word level transfer. With transfer learning via sentence embeddings, we observe surprisingly good performance with minimal amounts of supervised training data for a transfer task. We obtain encouraging results on Word Embedding Association Tests (WEAT) targeted at detecting model bias. Our pre-trained sentence encoding models are made freely available for download and on TF Hub.

